盘点机器人视觉3D成像技术案例
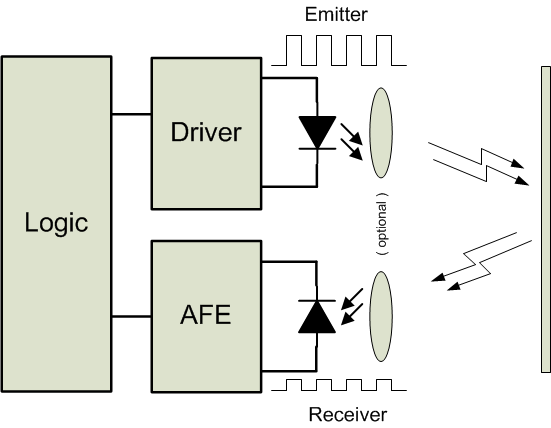
红外ToF技术将大幅提升接近感应传感器的性能及可靠性
综述:飞行时间(ToF)透散射介质成像技术
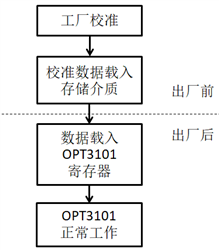
OPT3101工厂校准指南与调试经验
什么是飞行时间,3D成像机器人视觉3D成像方法比较
车载手势交互研究的六种技术路线
详解激光雷达点云数据的处理过程

如何使用多功能60GHz雷达传感器设计汽车车内手势检测系统
聚合物/硫代磷酸盐固态组合的新见解
timsTOF Pro质谱仪助力微量样本进行4D蛋白质组学研究
4D质谱技术深度解析小鼠蛋白质组在性别/年龄水平上的表达差异
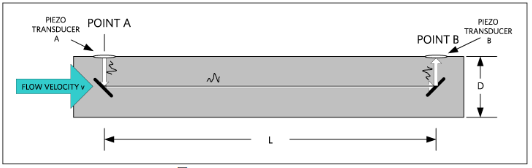
使用MAX35101校准超声波流量计中的水流量
分享一下ALBANY卷帘门的调试心得
什么是SLAM?SLAM算法实现的4要素
视觉惯性SLAM问题:SLAM和VO/VIO的区别是什么?

如何取消激光雷达接收器的环境光
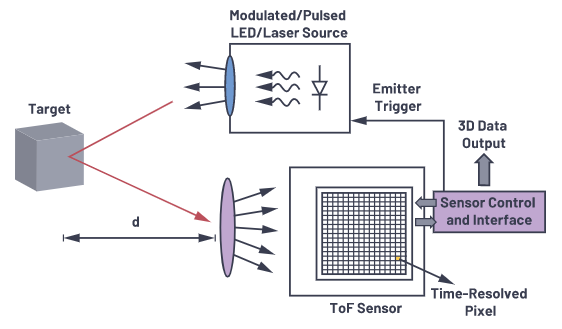
飞行时间深度传感相机的光学设计
缓解SEI电子泄漏实现稳定的钠离子电池
红磷负载Au单原子实现CO2光还原为C2H6
CO2转化为C2产物的高效光催化剂的设计研究

 下载APP
下载APP
 搜索内容
搜索内容
