
资料下载


使用PLC设计的机械手示教控制系统的详细资料说明
闪电xia
分享资料个
本文介绍了基于可编程序控制器的六关节机械手示教控制系统的主要结构与控制方法 。 该控制系统可在示教模式下完成对机械手四点以内的示教操作,并能在自动复现模式下再现示教的内容 。 经 实 践 证 明,本示教系统控制精度高、可 靠、性价 比 高、程 序 简 捷、修 改 方 便,实 时 性 好。
工业机械手是工业机器人的一个重要分支。 工业机械手在应用机械制造的多种工艺中代替人工, 成为机械加工人员所需掌握的生产工具。 各种类型机械手是自动化生产中必不可少的重要设备,尤其是在危险场合,在严重威胁人们安全和健康的环境下,采用机械手代替人,具有十分重要的意义,因而广泛应用于机械制造、冶金、电子、轻工和原子能等行业。
示教再现型机器手可以按照示教程序重复工作, 在生产中已得到广泛的应用。 示教是指机器人的作业路径、运动参数需要操作人员手把手示教或通过编程设定, 机器人重复再现示教的内容。
机械 手 在控 制 元 件选 择 上 通常 采 用 专用 控 制 器 或 通 用 控制器,虽然专用控制器的专用性强、程序语言严谨,但是价格高、维 护 较 困 难;而 采 用 如 PLC 等 通 用 控 制 器,具 有 程 序 修 改 简便,模块通用性强,标准化 程 度 高,系 统 开 发成 本 较 低等 特 点,应用前景较广阔。
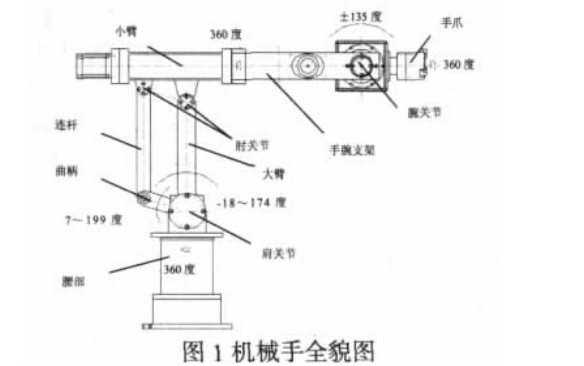
本示教系统由六自由度机械手、步进电机及其驱动器和编码器构成,采用 PLC 实现机械手六个自由度的定位控制,如图 1 所示。 该机械手为六个自由度垂直关节型机械手,由腰部(1 轴)、大臂(2 轴)、小臂(3 轴)、肘(4 轴)、手腕(5 轴)和气爪(6 轴)组成,全部采用可正、反转的步进电机作为动力源。步进 电 机是 一 种 将电 脉 冲 信号 转 换 成相 应 的 角 位 移 或 直线位移的数字/模拟装置。步进电机有回转式步进电机和直线式步进电机两种。对于旋转式步进电机而言,每当输入一个电脉冲后,步进电动机输出轴就转动一个角度(即步距角)。 若输入连续的电脉冲信号,步进电动机就会一步一步地转动,且步进电动机转过的角度与输入脉冲个数成严格的正比关系。
步 进 电 动 机 能 够 提 供 较 大 的 低 速 转 矩, 一 般 可 达 5 倍 于相 同 尺寸的直流伺 服 电动 机 的 连续 转 矩,2 倍于 无 刷 电动 机 的转矩。 在某些场合,可以直接驱动机器人的关节,而不需要减速装置。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





