
资料下载


×
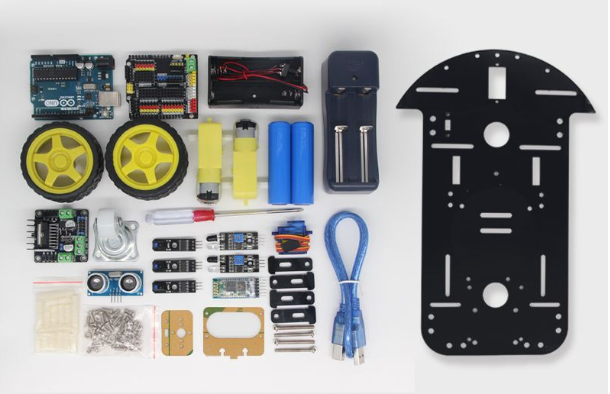
实现智能小车避障实验的资料和代码免费下载
消耗积分:0 |
格式:rar |
大小:0.58 MB |
2019-10-10
分享资料个
避障传感器基本原理,和循迹传感器工作原理基本相同,利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作。
二、实验接线:
实验时只需把信号输出端(signal)与单片机的P1^0口相连。VCC端接5V电源,GND接电源负极或单片机上的逻辑地。注意:如果对红外避障传感器的使能感兴趣,可以把传感器的TC端接单片机的I/O口,通过控制TC实现是否开启红外避障传感器,当TC为高电平时传感器工作,为低电平时,传感器关闭,参照图7。
三、实验任务:
1、把红外避障传感器固定在小车的正前方,接好线。注意:红外传感器的避障距离也是可调,调节滑动变阻器可以调节避障距离。
2、编制程序,实现小车检测到前方有障碍物时,向左转弯,再检测,没有障碍物,继续前进,有障碍物,继续左转弯。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





