
资料下载


×
如何进行简易避障机器人的设计
消耗积分:0 |
格式:rar |
大小:0.26 MB |
2019-06-19
分享资料个
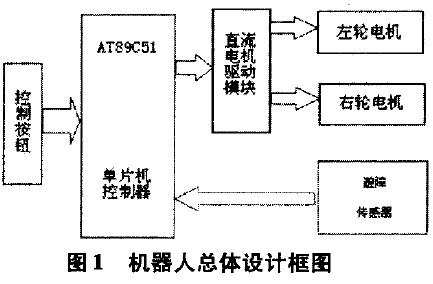
针对矿井中的各种灾害,设计了一种适合矿井救援的简易避障机器人。该设计以A1’89c51单片机作为智能机器人的检测和控制核心,采用红外光电传感器实现机器人避障。在硬件设计的基础上。通过软件编程,实现了对智能机器人行进、绕障、停止的控制和检测数据的存储、显示。本设计制作的简易避障机器人工作性能稳定。工艺简单,易于控制。且实验现场运行效果良好。
随着人类认知领域的不断扩展和研究层次的不断深入,人类的作业环境也开始向着更为复杂的空间发展,例如核辐射场所、深海、太空、有毒环境或高温高压等。这些环境的作业条件远远超出了人类所能够承受的极限。因此人们就开始寻找可以代替人来完成作业的物体,最终人们发明了机器人这种拟人化的机器。机器人是一种智能型的机器,它能够代替人类的部分工作,从处理个别问题的速度和可靠性来看,它在一定程度上已经超过了人。避障在机器人的工作中起着非常重要的作用,特别是在矿井救援等任务中,要顺利完成救援任务,机器人首先必须躲开障碍物。因此机器人避障的研究是对机器人能完成更多功能的一个基本铺垫,其研究意义非常重要。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





