
资料下载


×
基于MATLAB的坐标变换仿真的详细资料说明
消耗积分:0 |
格式:docx |
大小:0.49 MB |
2019-12-29
汤圆00
分享资料个
1.坐标类型及坐标变换类型
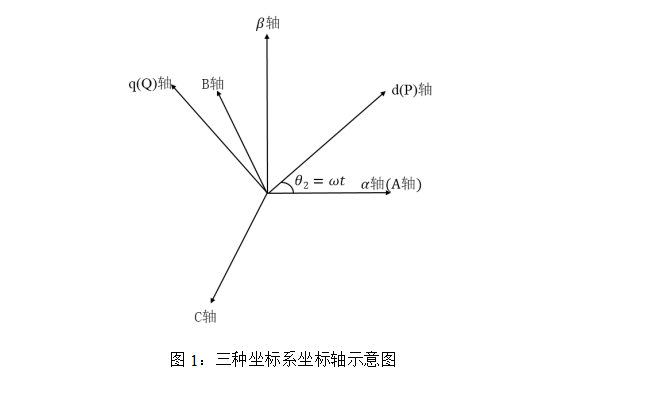
三相静止坐标系(A,B,C)、两相静止坐标系()及两相旋转坐标系(d,q)的坐标轴如图1所示,三相静止坐标A,B,C轴线相差120°,取两相静止正交的的坐标轴轴固定在静止的A轴方向上,轴超前A轴90°;取以速度旋转的d,q正交坐标轴的q轴超前d轴90°,d轴超前静止A轴的相位角,即d,q轴相对于A,B,C轴以的速度旋转。
常用的坐标变换有三类:一是三相静止(A,B,C)到两相静止(α,β);二是三相静止(A,B,C)到两相旋转(d, q),三是两相静止(α,β)到两相旋转(d, q)。也可以分为“等量变换”和“等功率变换”两种。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






