
资料下载


×
采摘机器人技术发展中面临的技术难题及解决方法介绍
消耗积分:0 |
格式:rar |
大小:1.44 MB |
2020-06-30
分享资料个
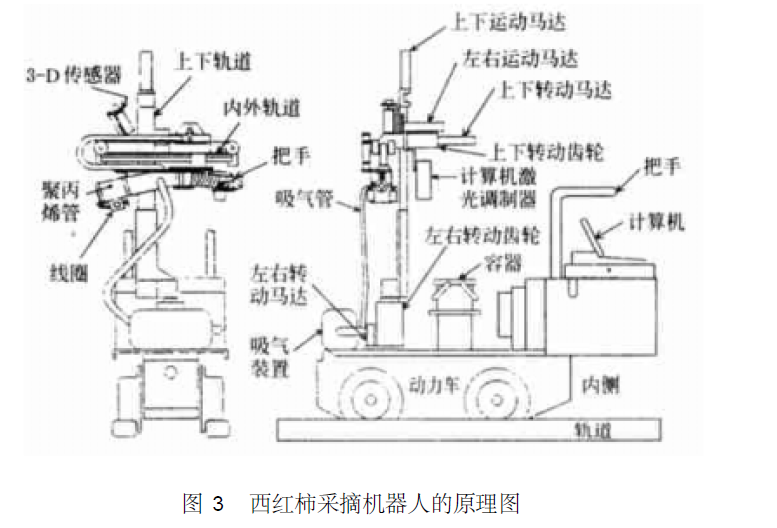
采摘机器人是21 世纪精准农业的重要装备之一, 是未来智能农业机械的发展方向。移动式采摘机器人由机械手、末端执行器、移动机构、机器视觉系统以及控制系统等构成。机械手的结构形式和自由度直接影响采摘机器人智能控制的复杂性、作业的灵活性和精度。移动机构的自主导航和机器视觉系统解决采摘机器人的自主行走和目标定位, 是整个机器人系统的核心和关键。该文对移动式采摘机器人的研究现状进行综合, 提出目前采摘机器人技术发展中面临的技术难题及相应的对策, 包括采用开放式控制系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




