
资料下载


×
主从异构手术机器人的运动误差如何进行分析
消耗积分:0 |
格式:rar |
大小:13.25 MB |
2020-04-15
分享资料个
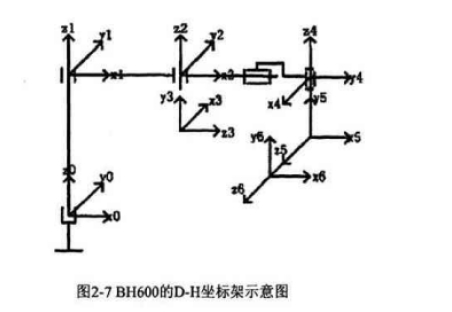
随着相关技术的迅速发展,主从异构机器人系统在微创手术中得到了成功的应用。主从异构机器人面向操作者和手术需求进行设计,具有设计周期短和针对性强等优点,但由于主从异构机器人的异构性对机器人的控制、设计和制造等方面都产生了不可忽视的影响,需要在研究的基础上,提出适当的解决措施。本文就不同的主从异构机器人的误差分布情况进行了分析和比较,探讨了减小主从异构机器人末端误差的相关方法。 首先,分别具体分析了PHANToM主手、BH600神经外科手术机器人和“妙手”喉部手术机器人的机构特点以及运动方式。在此基础上,确定了机器人各杆件上的坐标架和关节参数,并运用机器人领域中的通用建模方法D-H方法,建立主手和从手机器人的运动学模型。 其次,分析了影响主从机器人末端执行器的误差的因素,比较了各种机器人误差建模的方法。并选用了矢量法中的摄动法,在主从手运动学模型的基础上分别建立主手和从手机器人的误差模型。 最后,提出利用蒙特卡洛方法模拟主手和从手机器人的姿态误差在其工作空间内的分布状况,并在Matlab软件环境中,最终实现计算、统计机器人末端误差值和绘制主从手误差分布图。通过比较不同主从手误差分布差异和运动匹配性,进一步讨论主从手操作过程中减小末端执行器误差的有效方法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



