
资料下载


如何使用AVR和FPGA实现SOC FPSLIC的无人机下级控制系统
分享资料个
论文提出了一种基于FPSLIC的下位机控制器系统设计,并且在嵌入式硬件和软件的联合调度之下予以实现,并将该系统应用于微小型无人直升机MUAV控制上.
微小型无人直升机体积小、重量轻、隐蔽性好、机动性强、易实现悬停和超低空飞行,因此在军用和民用领域都有广泛的应用前景。微小型无人直升机在空中执行任务时需要实时获得在空间的姿态和高度位置信息,然后通过调制舵机状态来调整飞行器的空中姿态,纠正飞行路线,而MUAV的飞控系统需要具有负荷轻,功能强大,实时性强以及低功耗的特点,对嵌入式处理器要求较高,所以针对MUAV的控制采用上下位机联合控制的结构。并且由于目前现有的下位机控制器满足不了MUAV控制发展的需求,所以本文中利用FPSLIC优越的性能,实现了一种新的下位机控制器的设计,具有体积小、重量轻、价格低、功耗低、实时性强、可靠性高、扩展性好等优点的同时,完成了基于PWM的舵机的控制和基于Kalman滤波的多传感器的数据融合,以及上下位机之间的通讯等功能,具有较强的使用和应用价值。
论文首先介绍了MUAV飞行控制的结构,以及下位机实现功能的模块划分。然后是对MUAV控制系统相关理论的介绍,包括舵机控制的原理和方法以及多传感器数据融合的理论。
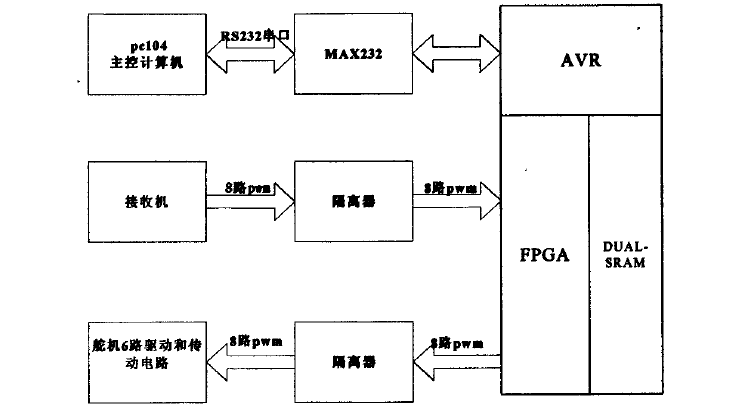
其次论文介绍了基于FPSLIC的下位机控制器系统的软硬件设计。在硬件设计上,给出了硬件总体设计方案,并对各个功能模块进行了详细论述,软件部分在给出了主要的框架和功能划分后,主要介绍了利用FPSLIC的FPGA部分实现PWM控制和测量的模块以及AVR部分对多传感器信息进行Kalman滤波融合的实现。
最后在实验室的汽油无人直升机的测试平台上进行了舵机控制和高度测试实验,取得了满意的实验结果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





