
资料下载


电动车设计开源
分享资料个
描述
介绍:
EV 是电动汽车的缩写。电动汽车是部分或完全依靠电力供电的车辆。电动汽车的运行成本低,因为它们需要维护的活动部件较少,而且非常环保,因为它们使用很少或不使用化石燃料(汽油或柴油)。虽然一些电动汽车使用铅酸或镍金属氢化物电池,但现代电池电动汽车的标准现在被认为是锂离子电池,因为它们具有更长的寿命并且在保持能量方面表现出色,每次自放电率仅为 5%月。尽管效率有所提高,但这些电池仍然存在挑战,因为它们可能会经历热失控,例如,导致特斯拉 Model S 起火或爆炸,
理论:
当汽车的踏板被踩下时,然后:
- 控制器从电池和逆变器获取并调节电能
- 通过控制器设置,逆变器然后向电机发送一定量的电能(根据踏板上的压力深度)
- 电动机将电能转化为机械能(旋转)
- 电机转子的旋转使变速器旋转,因此车轮转动,然后汽车移动。
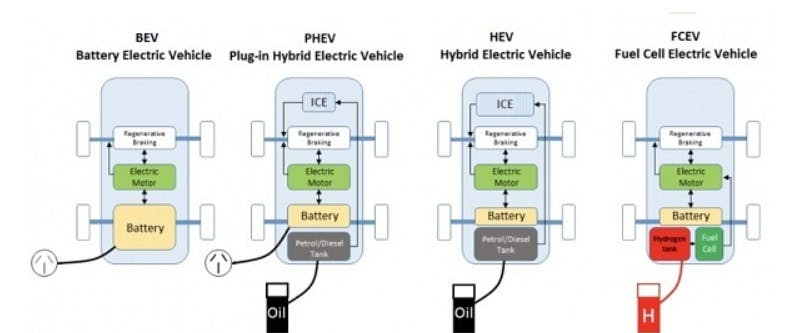
电动汽车有 4(四)种类型,概述如下:
- 电池电动汽车 (BEV)
杂交种
- 混合动力电动汽车 (HEV)
- 插电式混合动力汽车 (PHEV)
- 混合动力电动汽车 (HEV)插电式混合动力电动汽车 (PHEV)
- 燃料电池电动汽车 (FCEV)
系统级配置:
系统级配置处理整个 EV 的控制。整个电动汽车的简单框图将包括电池、直流电机及其控制单元、传动系统和车轮。
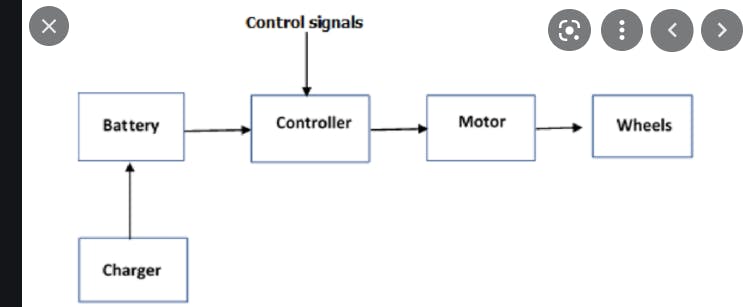
框图是 EV 的简单布局。在 matlab 模型中,我们将分别描述每个块。
EV 的设计是在 simulink 中使用所需的电池组和所需的直流电机完成的。EV 的建模是使用 simulink 完成的,以描述车辆的完整工作。
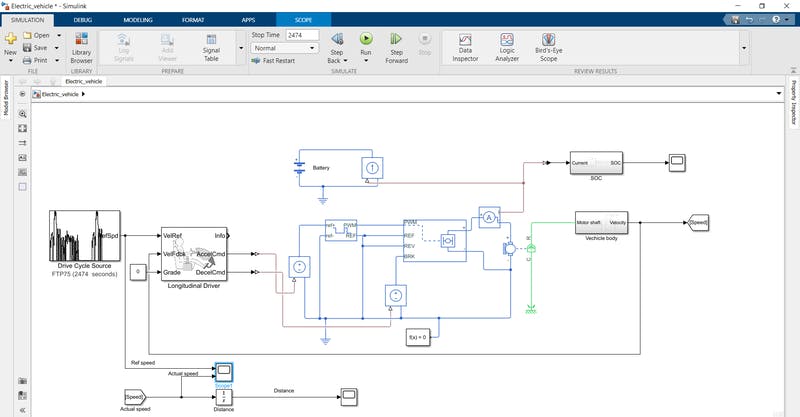
上面的框图用于刺激 EV。该模型包括,
1.车身子系统
2.直流电机
3.电机控制器
4.纵向驱动
5.驱动循环
6.电池
7.SOC子系统
现在我们可以看到用于 EV 建模的模块的组件级详细信息。
1.车身子系统:
该子系统由几个块组成,
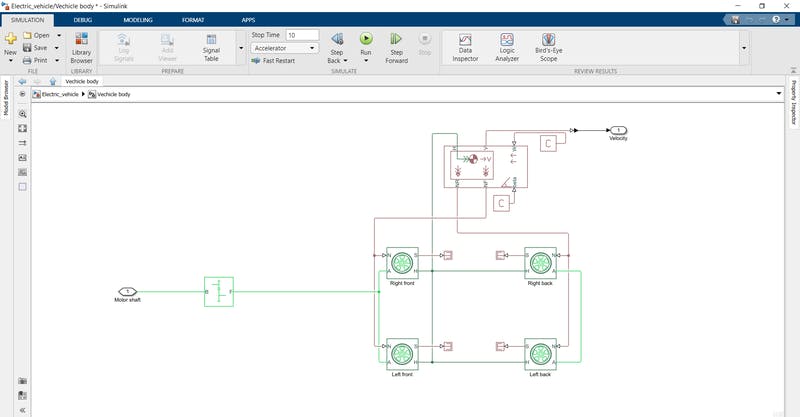
该子系统由车轮块、齿轮块和车身块组成。
轮胎块:

在这里,我们使用轮胎块(魔术轮块)来制作我们的 EV 车轮。该块有 4 个端口,即 A、N、S、H。
A口——轮轴机械保转口。同轴的车轮应通过此口连接。
N口——作用于其上的正常反应。此口与车体块相连。
H 端口 - 它是用于产生在其中产生的推力的车轮的机械平移保护端口。四个车轮通过该端口连接,并且该端口也连接到车体端口中的同一个平移端口。
S 端口 - 它是车轮的 Slip 输出。这里不连接,或者可以连接到用于无连接端口的 ps 终结器。
该块的特点是各种块参数,
- 峰值纵向力设置为3000N
- 滑动设置为 10%
- 轮胎半径为 0.3m
- 车轮惯量保持在1Kgm^2
- 滚动系数保持为0.015
此轮胎块与车体 simscape 块连接
车身:
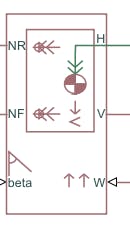
车体块用于将车轮连接到现实世界的车辆。它由 NR、NF、beta、V、H、W 块组成
Nf-Nr - 它们是连接到 EV 前后轮的正常反应输出端口。
H口- 与车轮H口相连的机械平移保护口。
V 端口 - 是车辆的实际输出速度,模拟后发送到示波器查看输出图。它也作为车辆控制的反馈。
beta - 道路倾斜角。这里它被认为是恒定的 0 值。
W端口- 迎面风速。这里被认为是常数0值。
改变块的参数以控制在轮轴之间分布的空气动力阻力、车身质量和路面倾角。
- 毛重为1200kg
- 几何参数保持不变
- 阻力系数取0.3
- 不考虑车辆的俯仰动力学。
齿轮箱:
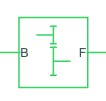
这里使用简单的齿轮箱进行模拟。B口作为输入,F口作为输出。输入用于将电机轴插入齿轮箱,输出口用于传递电机轴到轮轴。
电机轴的传递取决于齿轮箱的传动比。这里的值为3.73。齿轮箱的轴设置为与电机的旋转方向相同。
2.直流电机:
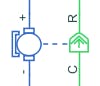
直流电机用于电动汽车的仿真。它由电气端子和机械端子组成。
+ 和 - 符号表示连接到受控电源的电机的电气输入。
R 和 C 符号表示电机的机械输出。R 端口给出扭矩和速度值,作为输入给车体子系统。C 端口连接到机械参考。
电机参数改变为,
- 磁场类型选择为永磁体
- 空载转速保持在10000rpm
- 额定转速8000rpm
- 额定负载为60kw
- 额定直流电源为 330v
3.电机控制器:
如果直流电机直接连接到电池,它将在电池所需的电压下运行,我们无法控制电机的速度。因此建议在电机和电池之间使用控制器。控制器由两个主要部件 - H 桥和 PWM 控制电压。
H桥:
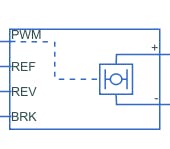
此块代表 H 桥电机驱动器。它有 $ 输入和两个输出端子。
PWM 端口 - 将电压采样到 PWM 信号的输入端口。该桥可以在两种模式下运行。在 PWM 模式下,如果给定的 pwm 大于阈值,桥将运行。在平均模式下,pwm电压值除以 pwm 信号来确定电桥导通时间的比率。
REF 端口 - 这是与 pwm 端口相结合的参考电压,以使电机平稳运行。它通常接地。
REV 端口 - 这决定了电机的反向运动。这里它是接地的。
BRk 端口 - 用于车辆制动。通过受控电压源与纵向驱动块连接。
该块的其他参数包括,
- 选择的模拟模式是平均模式,因为它节省了我们的模拟时间。
- 启用再生制动,因此当车辆开始减速时,电池会被充电。
- 负载电流设置为平滑值
- 输出幅度值设置为与电池电压相同的330v。
- 输入阈值保持为常数参数。
受控PWM电压:

Simulink 提供了一个内置的受控 PWM 电压模块。它是向 H 桥电路提供脉冲所必需的。
它由两个参考电压输入组成,用于为电机提供必要的电压。输入由驱动器提供,模块相应地生成用于加速和制动的脉冲。
它有两个输出端口,PWM端口连接H桥的PWM信号,ref也连接到H桥的ref来控制它。
块的参数包括,
- PWM 频率设置为 1000Hz。
- 模拟模式是平均的。
- 对于 0% 占空比,电压缩放为 0V,对于 100% 占空比,电压缩放为 5V。
4.纵向驱动:
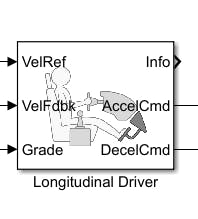
它是由动力总成模块组提供的内置模块。它用于通过参考值和反馈值向驾驶员发出加速和制动命令等命令。
Velref - 用于从预定义的驾驶循环数据中获取速度的参考输入值。
VelFdbk - 此端口从车身块获取反馈速度值,并将其与参考速度进行比较以实现所需的加速和减速
Grade - 用于定义车辆的梯度。这里我们假设它为 0。
Accelcmd - 它是一个输出端口,用于向电机提供加速命令。它通过受控电压源与受控pwm电压的正极相连。
Decelcmd - 它也是一个输出端口,用于向电机提供减速命令。它通过受控电压源与H桥的brk端口相连。
信息 - 它是各种总线信号的信号。此处未连接。
该模块通过 PI 控制器方法控制,具有跟踪饱和和前馈增益。
5.驱动循环:
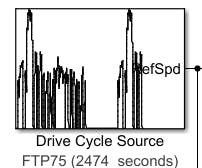
驱动循环源是用来为仿真提供参考速度的块。这里我们选择了FTP75标准驱动循环。它包含2474秒的数据点。refspd端口id连接到纵向驱动器的ref。
驾驶循环的参考速度也与车身块中的速度一起提供给范围,以检查相应的速度。输出速度也提供给积分器块并提供给范围以测量行驶距离机动车。
6.电池:

使用简单的电池模型进行仿真。电池通过受控电流源连接,电流传感器与电池和电机相连。受控电流源的输出提供给soc子系统。
电池的参数是,
- 充电容量是有限的。
- 电池标称电压为400V
- 安培小时额定值为 50
7.SOC子系统:
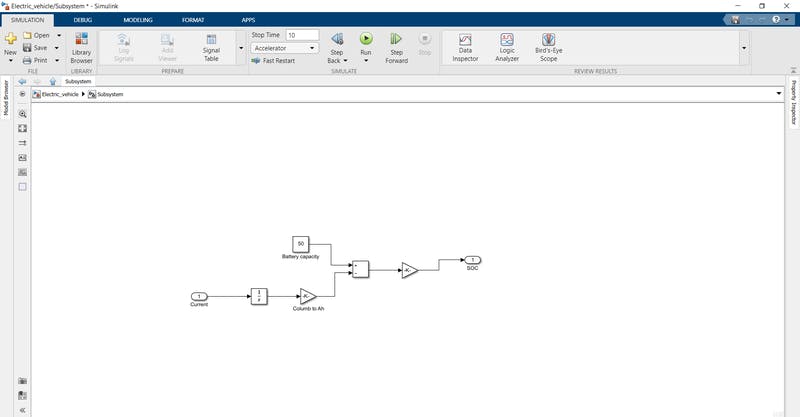
创建 SOC 子系统来计算电池的充电状态。该系统将电池电流作为输入,并给出充电状态作为输出。
将电池的电流积分得到充电值,然后将充电值转换为安培小时值。然后将转换后的值与标准电池充电容量进行比较。这里假设为 50Ah。
然后将比较值转换为百分比值,它将表示电池的充电状态。输出也提供给示波器以图形方式查看。
仿真结果:
现在完成上述所有连接后,我们需要运行模型。模型将运行 2474 秒,因为行驶周期包含 2474 个点。如果我们选择其他行驶周期选项,例如全开油门,我们可以决定总时间车辆必须运行。
我们的模拟结果如下,
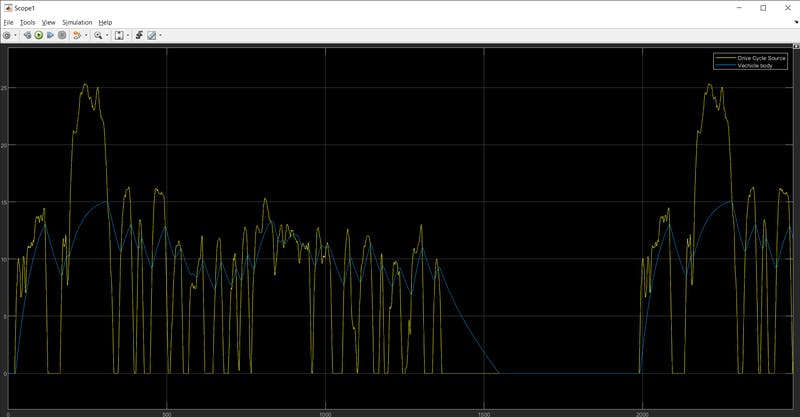
上图显示了参考速度和车辆实际速度。黄线表示参考速度,蓝线表示车辆实际速度。我们可以看到实际速度没有跟随参考速度。这是由于电机的参数,如果我们提高电机的额定值,我们可以获得非常精确的输出。
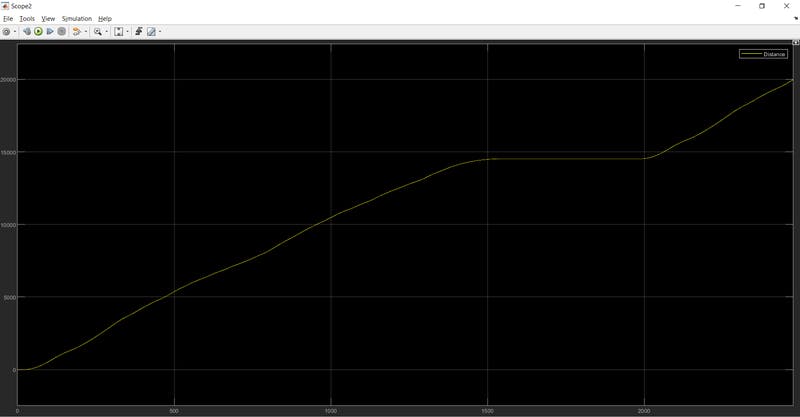
上图显示了车辆在整个时间段内行驶的距离。由于行驶周期中没有负速度,该图趋于增加。在2474s的行驶周期数据中,车辆总共行驶了20000m。我们可以还要看速度和距离的关系,当速度趋于0时,距离保持不变。
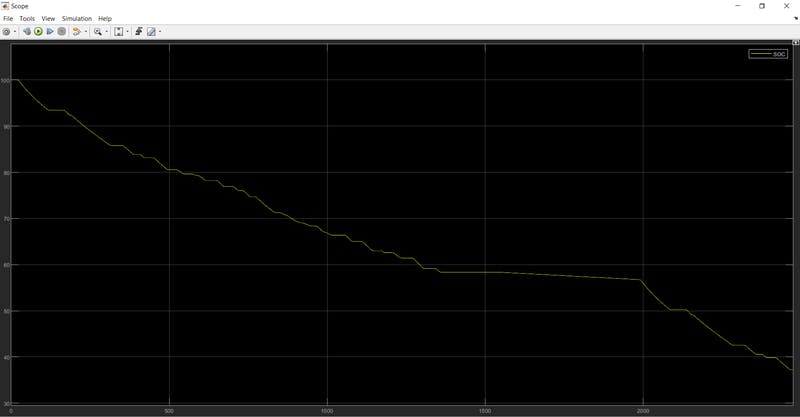
上图显示了电池的充电状态。电池的容量随着车辆的运行而下降。运行整个循环后,电池的充电状态下降到 35% 的值。
结论:
创建了具有简单电池和直流电机的 EV 模型,并对该模型进行了仿真以获得上述结果。该模型显示了电动汽车的性能。可以通过根据要求的参数设计电池和直流电机来改进它。该模型对于确定 EV 的实际参数非常有用。该模型提供了对电动汽车实际工作方式的基本了解
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



