
资料下载


超声波传感器开源分享
刘静
分享资料个
描述
当您尝试让超声波传感器工作时,您可能已经发现 HCSR04 的精度非常低。这个项目是关于将其测量升级到稳定和准确的程度。如果您现在认为这将是一个非常艰巨的项目,并且使用了许多复杂的方法,那么我现在想说:它不会。本教程将展示一些每个人都应该使用的简单技巧,但不幸的是,没有人使用它们。是时候改变它了!
入门
如果你知道 hcsr04 是如何工作的并且使用了一些基本的代码,你可以跳过这部分。
超声波传感器的工作原理。
超声波传感器使用声纳来确定与物体的距离。这是发生的事情:
- 发射器(触发引脚)发送信号:高频声音。
- 当信号找到一个物体时,它会被反射并……
- …发射器(回声针)接收它。
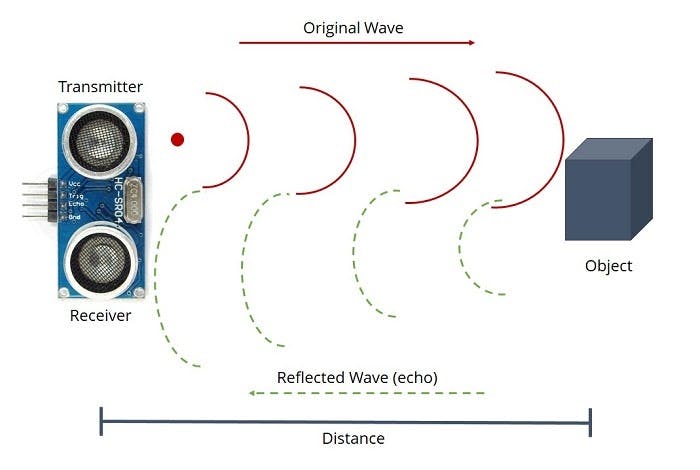
信号传输和接收之间的时间使我们能够计算到物体的距离。这是可能的,因为我们知道声音在空气中的速度。
HC-SR04 超声波传感器引脚

引脚
- VCC:+5VDC
- 触发:触发(输入)
- 回声:回声(输出)
- 接地:接地
标准代码:
代码的主要部分是一个函数,它测量触发引脚上的信号到 Echo 引脚上的信号变低的那一刻的时间。
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
//With measured time we calculate the distance in cm:
cm = (duration/2) * 0.034;
一切似乎都很好!但它不起作用。
标准代码有什么问题?
在收集了一些数据后,我们用它绘制了一个图表。它显示了声音从传感器传播到 30 厘米距离和向后的障碍物所花费的时间。
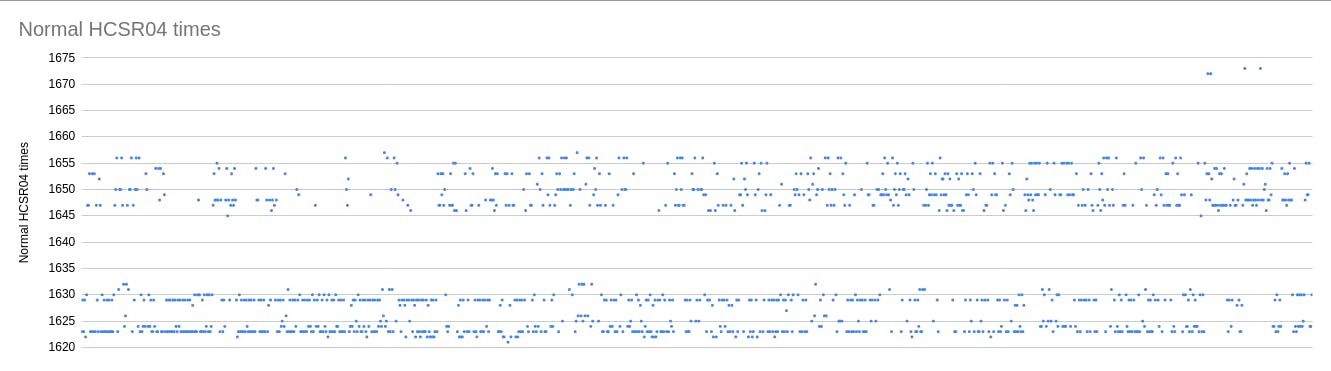
如您所见,这绝对是一团糟。您可能会说这只是传感器的不准确,但我找到了解决方案。问题不在于传感器,而在于 Arduino。当 Arduino 工作时,它会执行您编写的代码,但不仅如此。有时处理器会收到一个信号来冻结你的代码并制作其他东西,然后,他会恢复他冻结的东西。这种情况称为处理中断,在 Arduino 上很常见。问题是中断冻结了我们的计时器(PulseIn 函数),因此我们的读数被弄乱了。解决这个问题很容易。标准代码中只有两行:
noInterrupts();
duration = pulseIn(echoPin, HIGH);
interrupts();
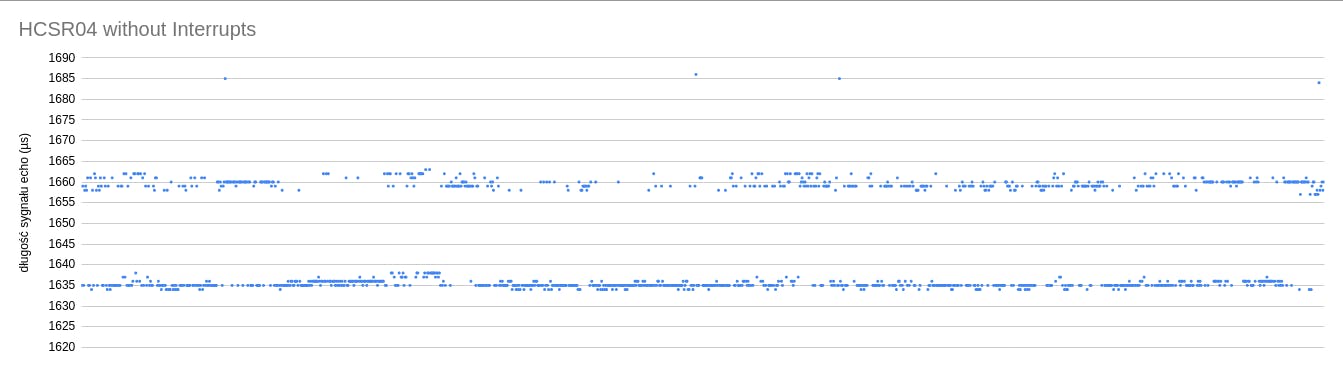
在没有中断的情况下,我们的读数看起来要好得多,但我们仍然看到一些读数比正常值高 25µs,很少甚至比正常读数高 50µs。那么为什么会这样呢?也许这就是传感器的精度?仍然没有。
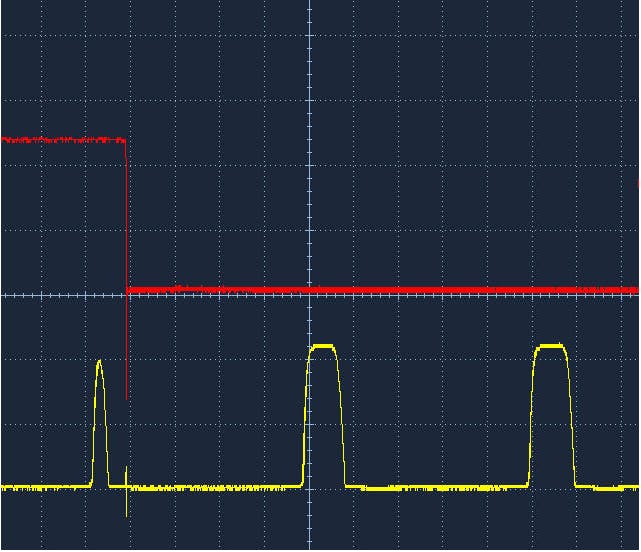
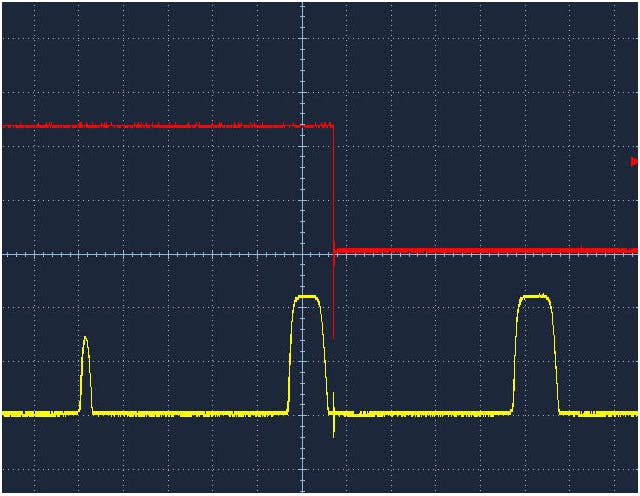
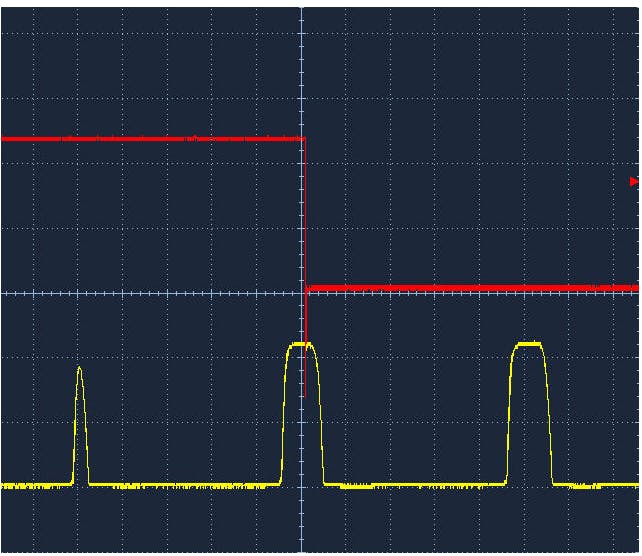
25µs 峰值。
传感器中的声音频率为 40 kHz,返回时的声波被传感器记录下来。声波发射时间为 200µs,这意味着它包含 8 个波峰。有时第一个返回的峰值不足以触发传感器。
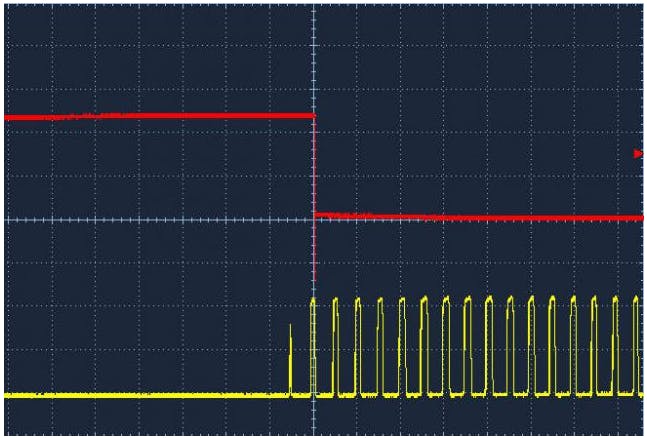
返回声波,第一个峰值未记录。用示波器制作的图表。
如何解决这个问题?
它不像中断那么容易,而且我没有确切的代码来修复它。只是关于该校正应该如何工作的想法。第一个想法是对大量测量值取平均值,但这意味着我们将始终得到比实际结果更高的结果。第二个选项是将结果分成两组并计算较低的平均值。因此,首先计算所有测量值的平均值,然后取其下结果的平均值。
HCSR04的真实精度。
如果是这种情况,HCSR04 会等待波返回并每 3µs 检查一次。问题是这意味着我们测量的时间比实际时间高出多达 3µs。如果不更换传感器,您将不会对此做任何事情。但是,3µs 仍然意味着 1.02mm 的精度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




