
资料下载


×
一个简单的光跟随器
消耗积分:0 |
格式:zip |
大小:0.27 MB |
2022-12-05
分享资料个
描述
1. 它是如何工作的?
以一种非常简单的方式选择上升或下降以跟随光线。有四个 LDR,两个向上,两个向下。Arduino 读取所有 LDR 的模拟值,如果两个较高值的平均值大于两个较低值,则光线向上,因此微伺服的角度增加,否则减小。
2. 一点澄清
由于平均值不是固定数字,如您在代码中所见,因此使用了阈值。这样,当且仅当两个平均值相差很大时,角度才会改变。
const int threshold = 50;
[.....]
down_average = (A0_val + A1_val)/2;
up_average = (A2_val + A3_val)/2;
diff = abs(up_average-down_average);
if ((up_average > down_average) && (diff > threshold))
{
if (val < 180) //if different from max val
{
val++;
myservo.write(val);
}
}
if((down_average > up_average) && (diff > threshold))
{
if (val > 0) //if different from min val
{
val--;
myservo.write(val);
}
}
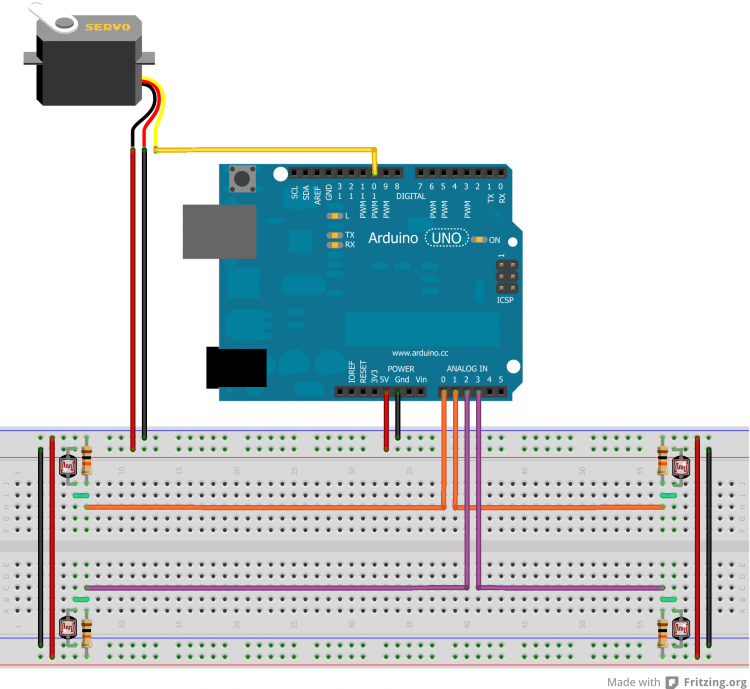
3.电路
制作下面的电路!
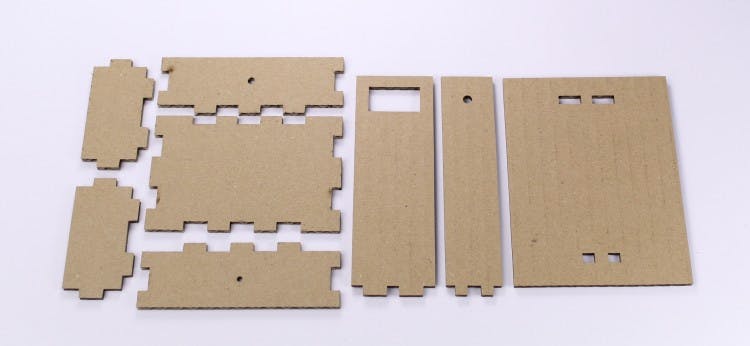
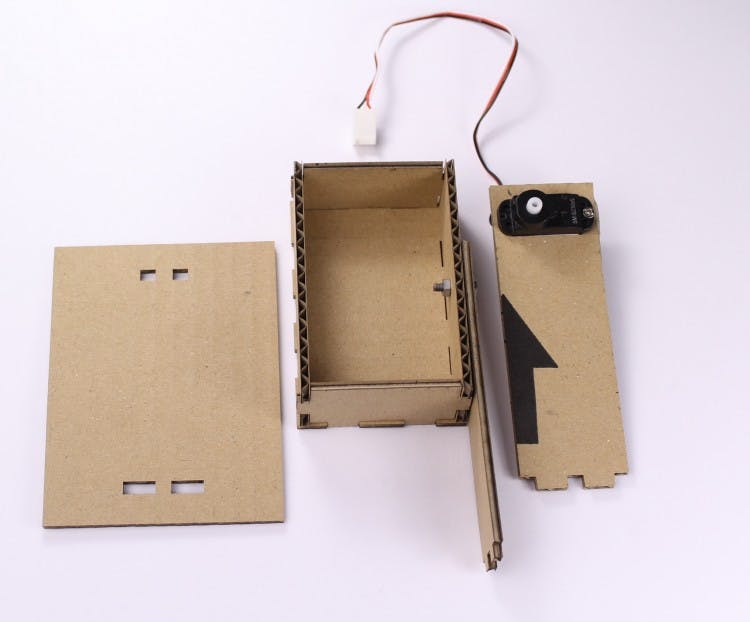
4.打印和切割
下载附件,打印出来,粘在硬纸板上,然后为你的光追随者剪下所有的部分。你应该得到这样的东西。
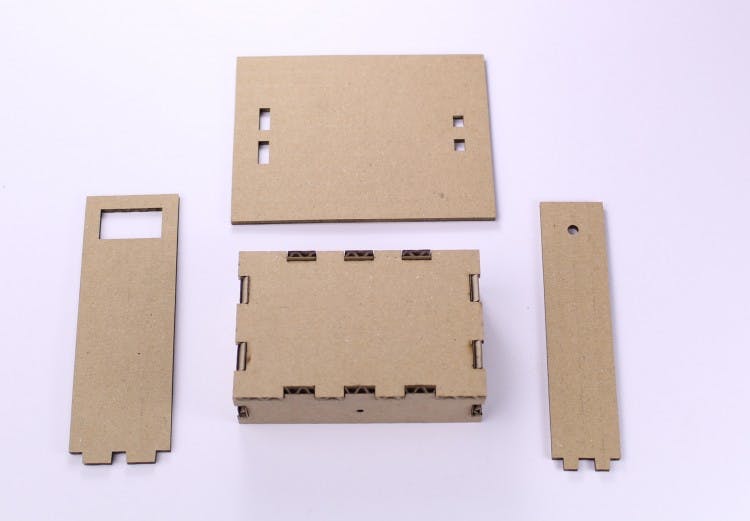
5. 安装底座
以这种方式安装面包板底座。必要时粘上它。
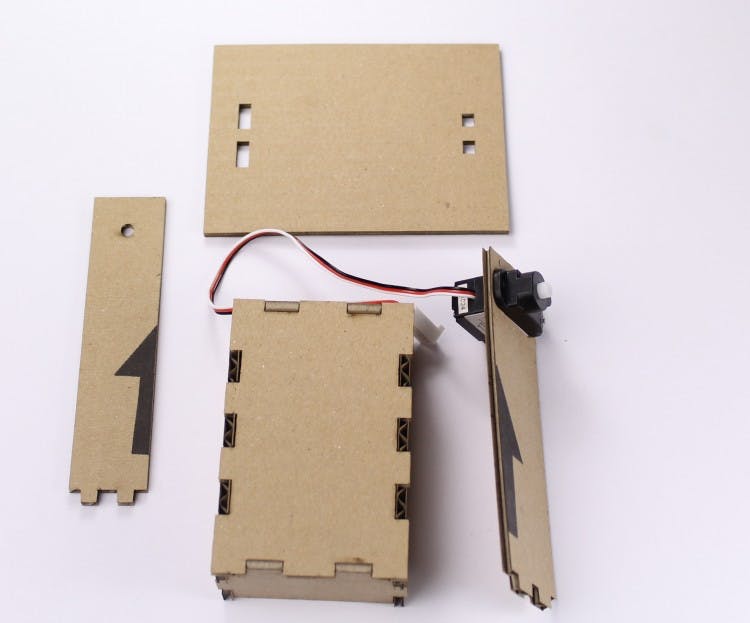
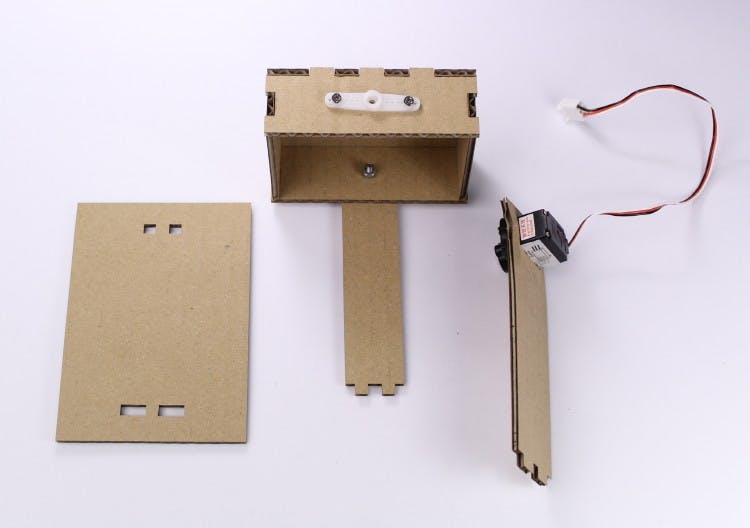
6.安装舵机
如下安装伺服。拧紧它以获得更高的稳定性。
7. 安装支架
以这种方式安装支架。
8.安装伺服齿轮
安装伺服齿轮。以这种方式拧紧它。
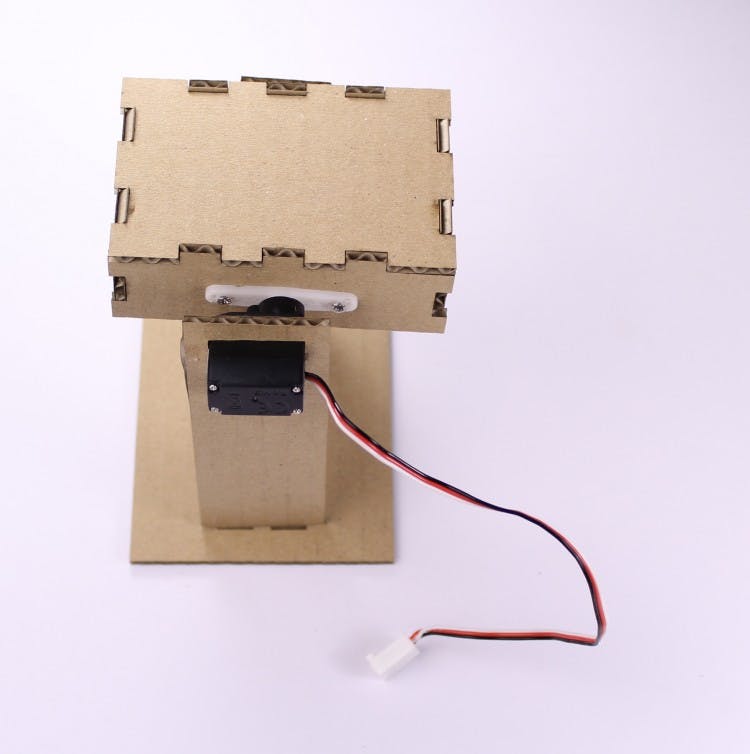
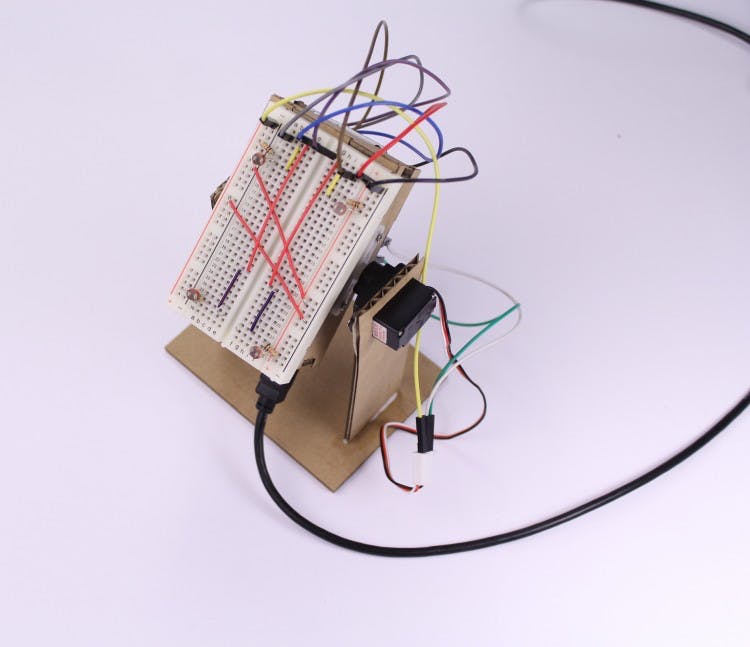
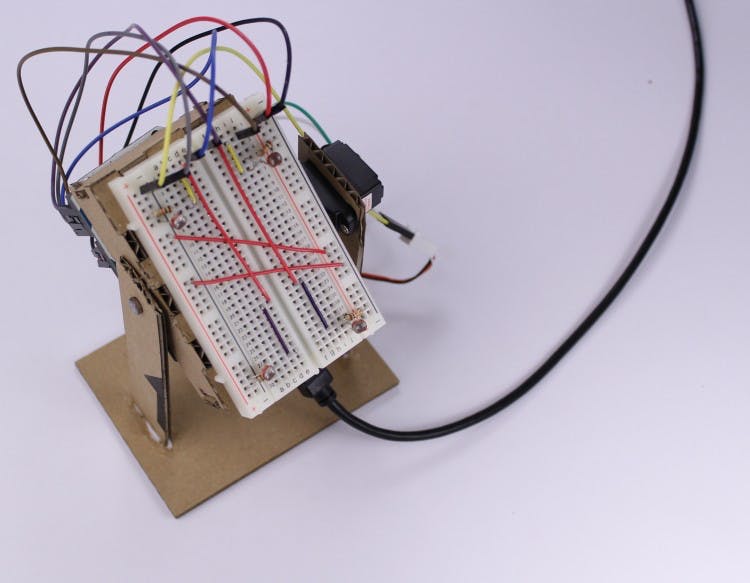
9. 放在一起
放在一起。你应该得到这样的东西
10.将面包板粘在底座上
将面包板粘在底座上。您可以使用面包板的双面胶带。
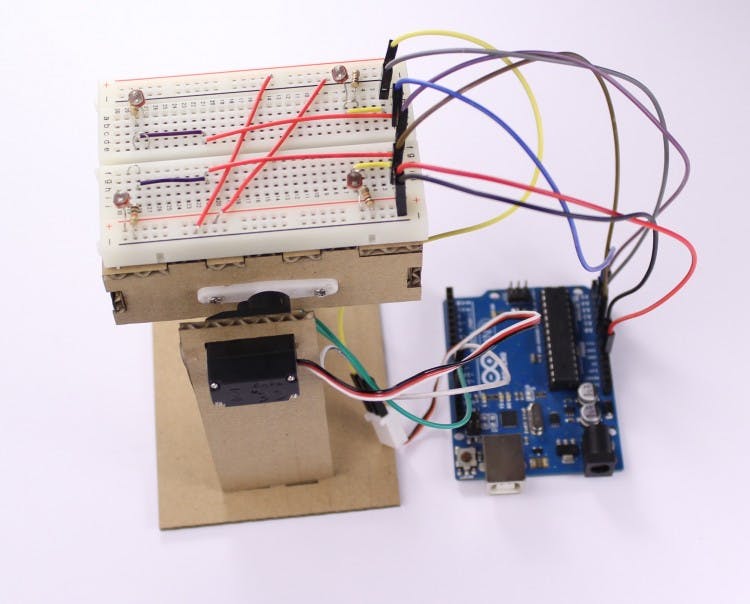
11. 拧 Arduino
将 Arduino 拧在底座背面。
12. 干得好
做得好。现在你拥有了所有必要的东西。在您的 Arduino 上下载代码并与您的光追随者一起享受吧!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





