
资料下载


Noot Shoot云台开源分享
王艳
分享资料个
描述
该项目是 ME 461(机械系统的计算机控制)的最终作业的结果,这是伊利诺伊大学提供的一门课程。
介绍
Noot Shoot是一款云台上的橡皮筋射击游戏,使用计算机视觉瞄准特定颜色。云台使用 HiTec HS-311 伺服系统移动,安装在从 servocity 获得的块中。摄像头被拧在前面。另一个伺服器用作射手的触发器。
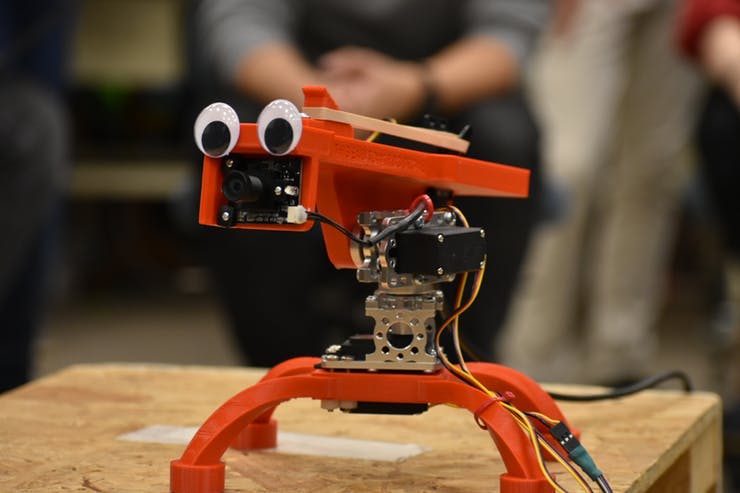
伺服系统使用德州仪器 (TI) 的微控制器 MSP430 进行定向,而 Orange Pi Zero 则用于与相机接口。舞台和腿是 3D 打印的。
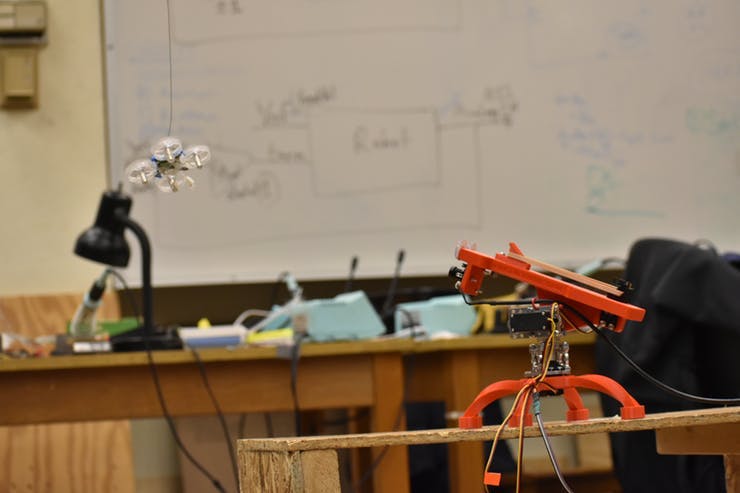
系统输入
系统的输入是来自摄像机的实时馈送。在 Pi 中连续运行的 C++ 程序逐帧读取此提要并计算我们感兴趣的对象的中心坐标。在我们的例子中,我们将颜色范围定位在一系列 HSV 值之间:(239*, 103 , 103) 和 (15*, 255, 255)。这对应于 HSV 光谱中的亮粉色。该程序计算帧中的所有粉红色像素,如果有超过 60 个活动像素,则计算对象的质心(这是必要的,因此环境中的噪声不会被视为对象)。这些坐标使用 I2C 通信协议发送到 MSP430。
其他输入是两个按钮。一个用于手动拍摄,另一个用于改变状态。下一节将详细介绍更多信息。
比例控制器
一旦 MSP430 接收到物体的中心坐标,x 轴和 y 轴的误差就会计算为相机框架中心与物体中心之间的差值。误差的大小表明需要多少转弯。因此,我们将转率计算为误差和我们调整的比例增益的乘积。然后从先前发送的伺服命令中减去该转速,并将该新值设置为伺服的新目的地。我们需要减去,因为误差和舵机的正角运动方向相反。
errorX = 160 - rxlong1; // rxlong1 is the x-coordinate of the object in frame.
errorY = 120 - rxlong2; // rxlong2 is the y-coordinate of the object in frame.
turnrateX = kpx*errorX; // kpx and kpy are gain values that need to be tuned.
turnrateY = kpy*errorY;
currX = prevX - (turnrateX * 20)/1000; //We multiply with 0.02 based on the loop time
currY = prevY - (turnrateY * 20)/1000;
状态机
我们将控制程序包装在状态机中。射手可以分为两种状态。它要么正在主动识别要射击的目标,要么处于重新加载模式,此时载物台停止移动,以便用户可以加载下一个橡皮筋。射手以主动观察模式开始。以下是导致状态改变的条件:
从主动寻找到重装模式:
按状态更改按钮。
- 按状态更改按钮。
按下手动拍摄按钮。这会启动橡皮筋,并且射手会在很短的延迟后进入重新加载模式。
- 按下手动拍摄按钮。这会启动橡皮筋,并且射手会在很短的延迟后进入重新加载模式。
x 轴和 y 轴的误差小于定义的阈值超过 3 秒。这意味着目标要么移动非常缓慢,要么根本不动。在这种情况下,射击者会自动射击橡皮筋,然后在很短的延迟后进入装弹模式。
- x 轴和 y 轴的误差小于定义的阈值超过 3 秒。这意味着目标要么移动非常缓慢,要么根本不动。在这种情况下,射击者会自动射击橡皮筋,然后在很短的延迟后进入装弹模式。
从重新加载模式到积极寻找:
按状态更改按钮(这是唯一的方法)。
- 按状态更改按钮(这是唯一的方法)。
更多 MSP430 实施细节
结合三个伺服系统:我们使用定时器 B 来实现平移和倾斜伺服系统。载波频率设置为 20 ms。定时器设置为向上模式,输出模式设置为重置/设置。计时器 A 也进行了类似的调整,以控制射手伺服系统。
按钮连接:如上所述,我们使用了 2 个按钮。为此,我们将引脚 2.4 和 2.5 定义为启用和下拉电阻器的输入引脚。这些按钮还连接到电容器以防止弹跳。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






