
资料下载


使用REST使用Meadow和MAUI远程控制伺服
分享资料个
描述
项目更新为 V1.0 Release Candidate 1(2022 年 10 月 23 日)
该项目向您展示如何通过使用 Maple 向作为服务器运行的 Meadow 发送 http 请求来使用 MAUI 应用程序控制 MicroServo。
Maple通过 Web API 公开控制,使与 Meadow 建立连接的设备变得容易。Maple是一个开源、超轻量级、支持 JSON 的 RESTful Web 服务器。它还具有广告功能,这意味着您可以通过使用其名称和 IP 地址收听 UDP 广播消息来发现网络中的 Maple 服务器。
Meadow.Foundation是一个平台,用于在 Meadow 上使用 .NET 快速轻松地构建连接的事物。它由Wilderness Labs创建,完全开源并由 Wilderness Labs 社区维护。
如果您是 Meadow 的新手,我建议您通过控制板载 RGB LED 项目转到 Meadow 入门,以正确设置您的开发环境。
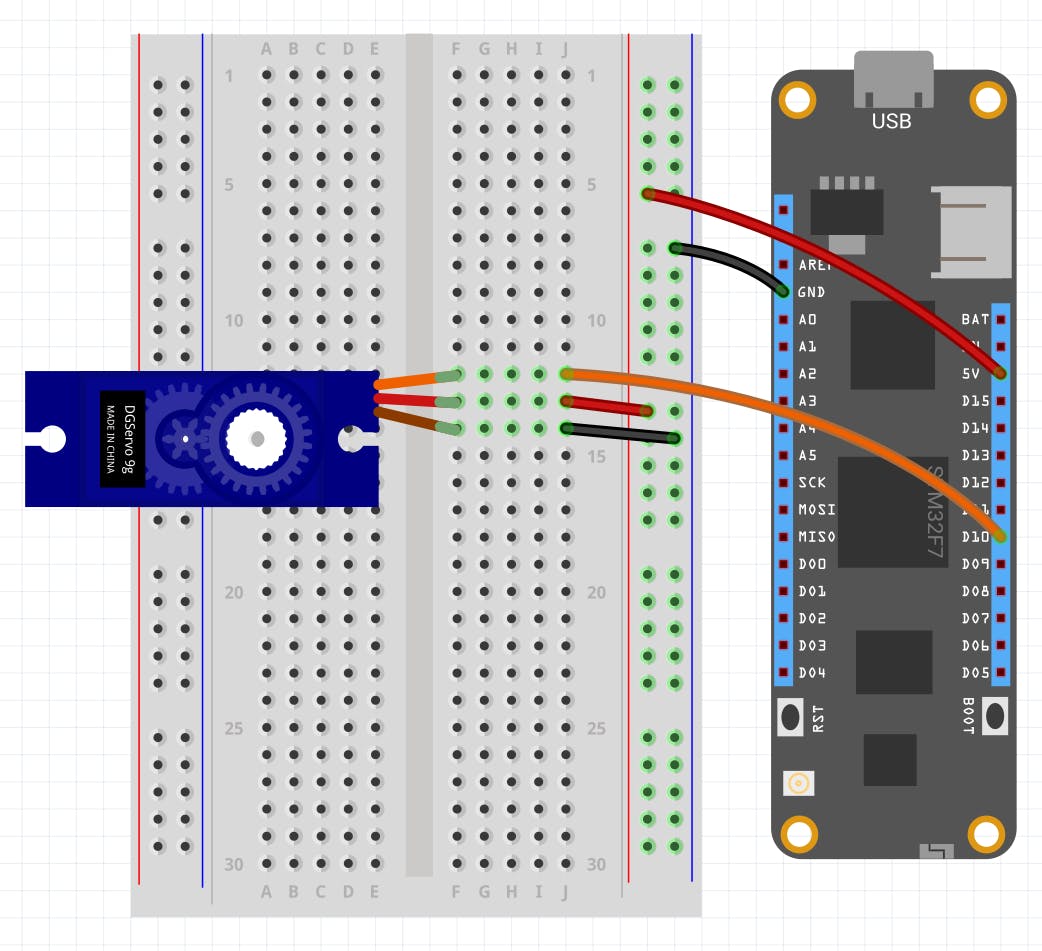
第 1 步 - 组装电路
如下所示连接您的项目:
第 2 步 - 创建 Meadow 应用程序项目
在 Visual Studio 2019 for Windows或macOS中创建一个新的Meadow Application项目并将其命名为MeadowMapleServo 。
第 3 步 - 添加所需的 NuGet 包
对于这个项目,搜索并安装以下 NuGet 包:
第 4 步 - 为 MeadowMapleServo 编写代码
让我们遍历每个类来构建这个项目:
为每个涉及的外围设备创建一个 Controller 类是一个很好的做法,可以使项目更具可扩展性、可维护性和清洁性。这些 Controller 类抽象了所有外围设备的逻辑,因此主要程序逻辑将保持清晰和易于理解。
伺服控制器类
public class ServoController
{
private static readonly Lazy instance =
new Lazy(() => new ServoController());
public static ServoController Instance => instance.Value;
Servo servo;
Task animationTask = null;
CancellationTokenSource cancellationTokenSource = null;
protected int _rotationAngle;
private ServoController()
{
Initialize();
}
private void Initialize()
{
servo = new Servo(
device: MeadowApp.Device,
pwmPort: MeadowApp.Device.Pins.D10,
config: NamedServoConfigs.SG90);
servo.RotateTo(NamedServoConfigs.SG90.MinimumAngle);
}
public void RotateTo(Angle angle)
{
servo.RotateTo(angle);
}
public void StopSweep()
{
cancellationTokenSource?.Cancel();
}
public void StartSweep()
{
animationTask = new Task(async () =>
{
cancellationTokenSource = new CancellationTokenSource();
await StartSweep(cancellationTokenSource.Token);
});
animationTask.Start();
}
protected async Task StartSweep(CancellationToken cancellationToken)
{
while (true)
{
if (cancellationToken.IsCancellationRequested) { break; }
while (_rotationAngle < 180)
{
if (cancellationToken.IsCancellationRequested) { break; }
_rotationAngle++;
servo.RotateTo(new Angle(_rotationAngle, Angle.UnitType.Degrees));
await Task.Delay(50);
}
while (_rotationAngle > 0)
{
if (cancellationToken.IsCancellationRequested) { break; }
_rotationAngle--;
servo.RotateTo(new Angle(_rotationAngle, Angle.UnitType.Degrees));
await Task.Delay(50);
}
}
}
}
如您所见,此类包含以下方法:
-
Initialize()- 用于设置 MicroServo 并通过将其旋转 0 度将其设置到初始位置。 -
RotateTo(Angle angle)- 使舵机按指定角度旋转。 -
StartSweep()- 使伺服来回旋转到其最大角度范围。 -
StopSweep()- 停止扫描动作。
ServoControllerRequestHandler 类
public class ServoControllerRequestHandler : RequestHandlerBase
{
public ServoControllerRequestHandler() { }
[HttpPost("/rotateto")]
public IActionResult RotateTo()
{
int angle = int.Parse(Body);
ServoController.Instance.RotateTo(new Angle(angle, Angle.UnitType.Degrees));
return new OkResult();
}
[HttpPost("/startsweep")]
public IActionResult StartSweep()
{
ServoController.Instance.StartSweep();
return new OkResult();
}
[HttpPost("/stopsweep")]
public IActionResult StopSweep()
{
ServoController.Instance.StopSweep();
return new OkResult();
}
}
此类用于公开所有服务器入口点,以便客户端可以发送 Http POST 请求来控制伺服。请注意,Servo Controller 类中的每个方法都有一个。
秘密课
public class Secrets { ////// Name of the WiFi network to use. /// summary> public const string WIFI_NAME = "[SSID]"; ////// Password for the WiFi network names in WIFI_NAME. /// summary> public const string WIFI_PASSWORD = "[PASSWORD]"; }
我们需要此类来输入我们的 WiFi 凭据,以便 Meadow 可以加入我们的网络。
MeadowApp 类
// public class MeadowApp : App <- If you have a Meadow F7v1.*
public class MeadowApp : App
{
MapleServer mapleServer;
public override async Task Initialize()
{
var onboardLed = new RgbPwmLed(device: Device,
redPwmPin: Device.Pins.OnboardLedRed,
greenPwmPin: Device.Pins.OnboardLedGreen,
bluePwmPin: Device.Pins.OnboardLedBlue);
onboardLed.SetColor(Color.Red);
ServoController.Instance.RotateTo(new Angle(NamedServoConfigs.SG90.MinimumAngle));
var wifi = Device.NetworkAdapters.Primary();
var connectionResult = await wifi.Connect(Secrets.WIFI_NAME, Secrets.WIFI_PASSWORD, TimeSpan.FromSeconds(45));
if (connectionResult.ConnectionStatus != ConnectionStatus.Success)
{
throw new Exception($"Cannot connect to network: {connectionResult.ConnectionStatus}");
}
mapleServer = new MapleServer(wifi.IpAddress, 5417, true, logger: Resolver.Log);
mapleServer.Start();
onboardLed.SetColor(Color.Green);
}
}
这个主类中最重要的部分是 Initialize 方法,我们首先初始化我们的ServoController ,我们激活我们的网络适配器加入我们的网络,我们创建一个新的MapleServer对象, Advertise 参数设置为true ,一旦板载 LED 亮起绿色,应用程序最终在 MeadowApp 的构造函数末尾启动了 maple 服务器。
这就是我们在 Meadow 方面需要做的一切。现在让我们快速浏览一下 Xamarin 配套应用。
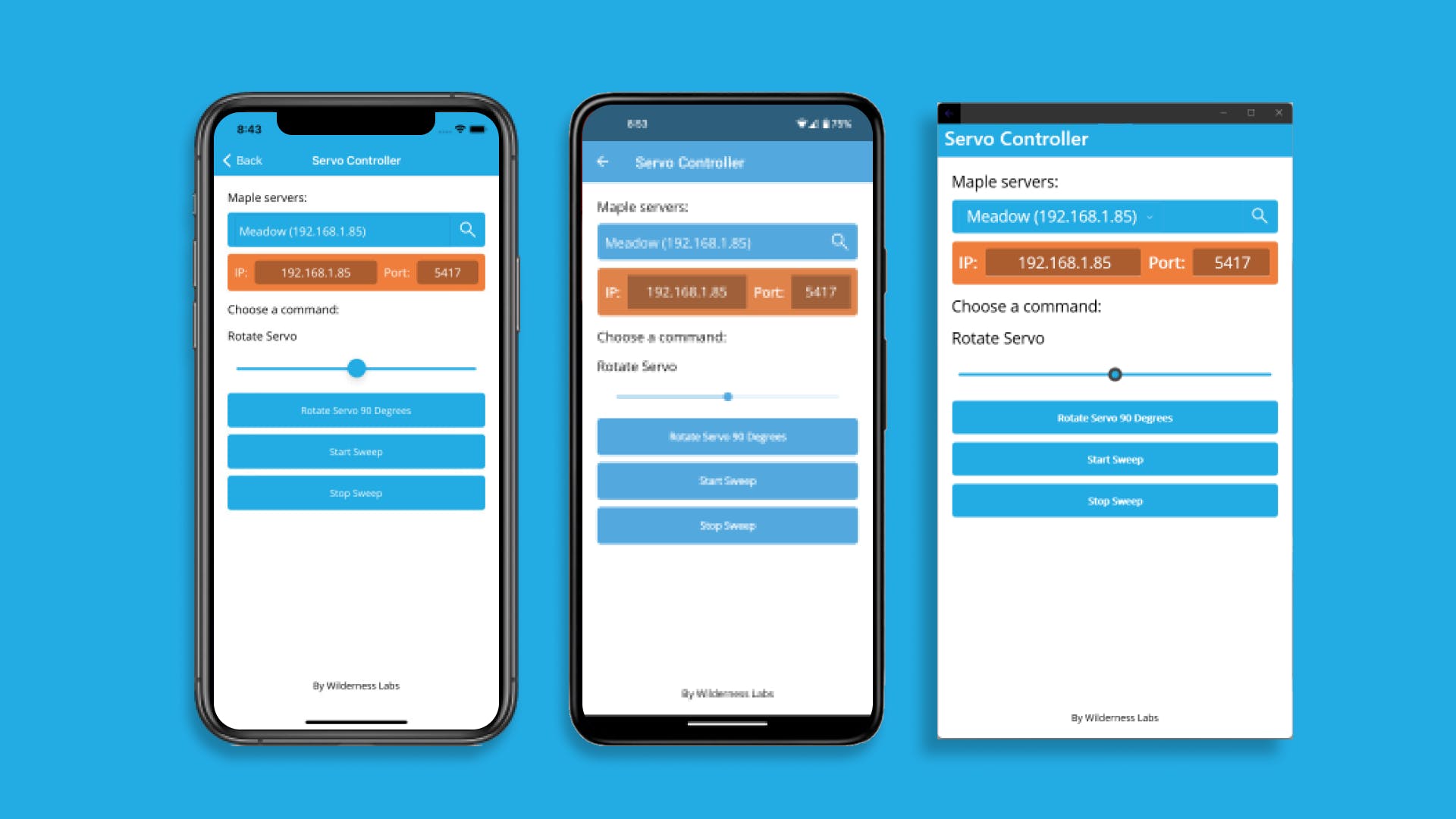
第 5 步 - 了解 MAUI 应用程序
正如我们所提到的,在这个项目中,我们包含了一个在 iOS、Android 和 Windows 上运行的 MAUI 应用程序。
我们需要了解的基本内容是:
由于我们有一个在 Meadow 板上运行的 Maple Server NuGet 包,我们还有一个 Maple Client 包,您可以将其安装在您的 .NET 应用程序中。
使用 Maple 客户端
在 BaseViewModel 的构造函数中,我们可以看到如何创建一个 MapleClient 对象:
...
client = new MapleClient();
client.Servers.CollectionChanged += ServersCollectionChanged;
...
当应用程序在网络中找到 Maple 服务器时,将触发ServersCollectionChanged事件处理程序。
要找到通过网络发布信息的 Maple 服务器,您只需调用:
await client.StartScanningForAdvertisingServers();
一旦找到服务器,它将触发CollectionChanged事件,然后应用程序填充一个 ServerModel 列表,您可以使用选择器选择要向其发送服务器请求的服务器。
向 Maple 服务器发送命令
在此ServoControllerViewModel,要注意的最重要的代码部分是SendServoCommand方法:
async Task SendServoCommand(string command)
{
if (IsBusy)
return;
IsBusy = true;
try
{
bool response = await client.PostAsync(SelectedServer != null ? SelectedServer.IpAddress : IpAddress, ServerPort, command, AngleDegrees.ToString());
if (response)
{
IsCyclingStart = IsCyclingStop = IsRotateTo = false;
switch (command)
{
case "RotateTo": IsRotateTo = true; break;
case "StartSweep": IsCyclingStart = true; break;
case "StopSweep": IsCyclingStop = true; break;
}
}
else
{
Console.WriteLine("Request failed.");
}
}
catch (Exception ex)
{
Console.WriteLine(ex.Message);
}
finally
{
IsBusy = false;
}
}
您可以看到该方法以字符串形式接收命令,我们使用MapleClient对象的PostAsync方法通过传递 Meadow 的 IP 地址、端口、命令和最后的角度值来发送命令,如果调用RotateTo API ,则旋转舵机.
第 6 步 - 运行项目
单击Visual Studio中的“运行”按钮。它应该类似于以下 GIF:
查看 Meadow.Foundation!
就您可以使用 Meadow.Foundation 做的大量令人兴奋的事情而言,这个项目只是冰山一角。
它带有一个庞大的外设驱动程序库,其中包含适用于最常见传感器和外设的驱动程序。
- 它带有一个庞大的外设驱动程序库,其中包含适用于最常见传感器和外设的驱动程序。
- 外设驱动程序封装了核心逻辑并公开了一个简单、干净、现代的 API。
- 该项目得到了不断发展的社区的支持,该社区不断致力于构建酷炫的互联事物,并且总是乐于帮助新来者和讨论新项目。
参考
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




