
资料下载


使用Bittle和Raspberry Pi 4的ROS SLAM
李艳
分享资料个
描述
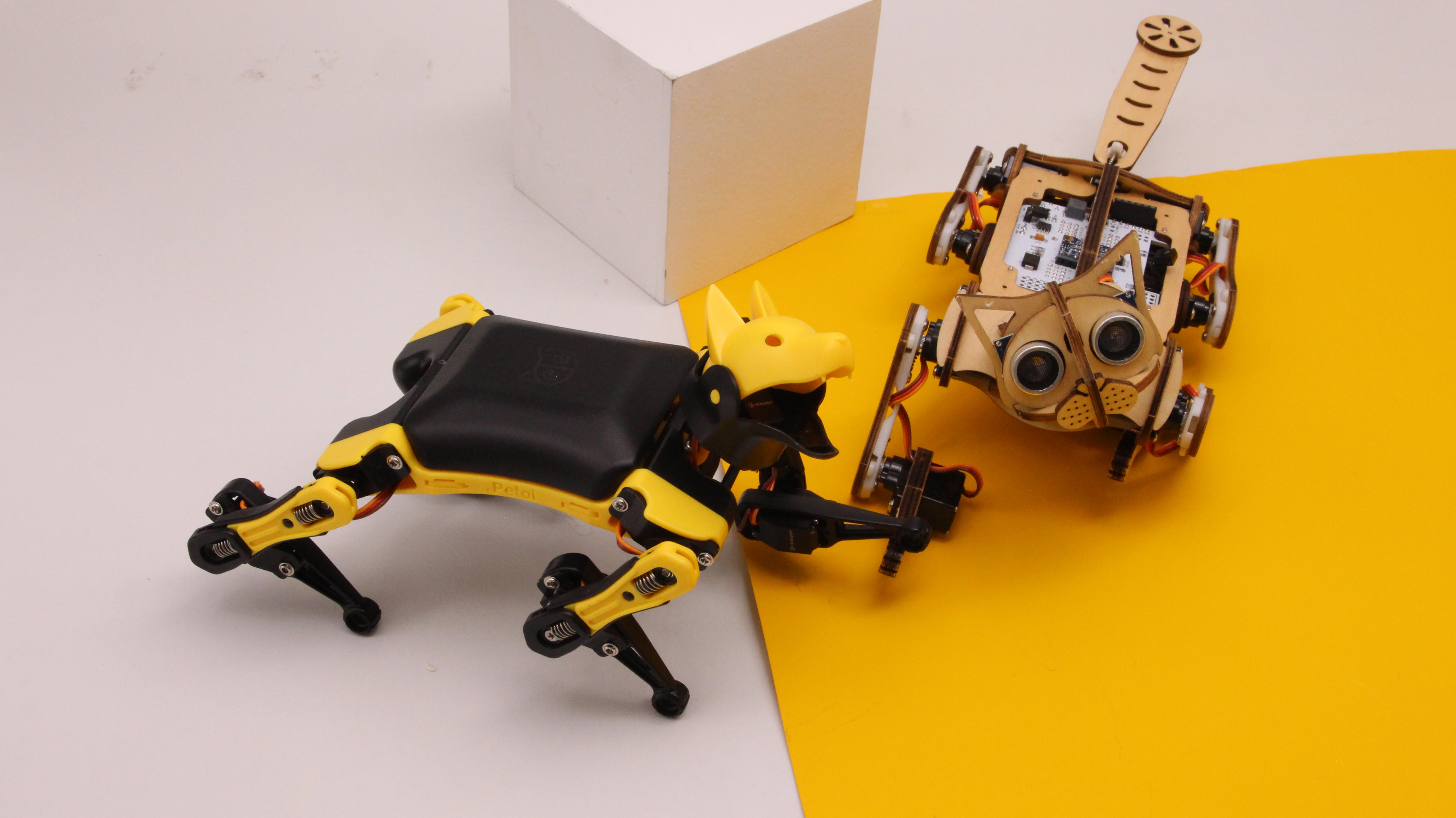
本文的主题将是 SLAM 和 ROS 映射。我们将使用来自 Petoi 的敏捷四足机器人 Bittle,它在上个月完成了他们的 Kickstarter 活动并取得了巨大成功。
首先让我们从一些理论开始。
2022 年 4 月 4 日更新。我尽我所能定期更新我的文章,并根据您在 YouTube/Hackster 评论部分的反馈。如果您想表达对这些努力的支持和赞赏,请考虑给我买杯咖啡(或披萨):)。
什么是SLAM?
SLAM 代表 Simultaneous Localization and Mapping - 它是一组算法,允许计算机创建 2D 或 3D 空间地图并确定其在其中的位置。虽然 SLAM 本身并不是导航,但拥有地图并知道您在地图上的位置是从 A 点导航到 B 点的先决条件。
我们可以使用各种传感器来接收有关可用于映射的环境的数据
- 激光扫描仪(一维和二维(扫描)激光测距仪)
- 相机(单目、立体和 RGB-D)
- 声纳传感器
- 触觉传感器
- 其他
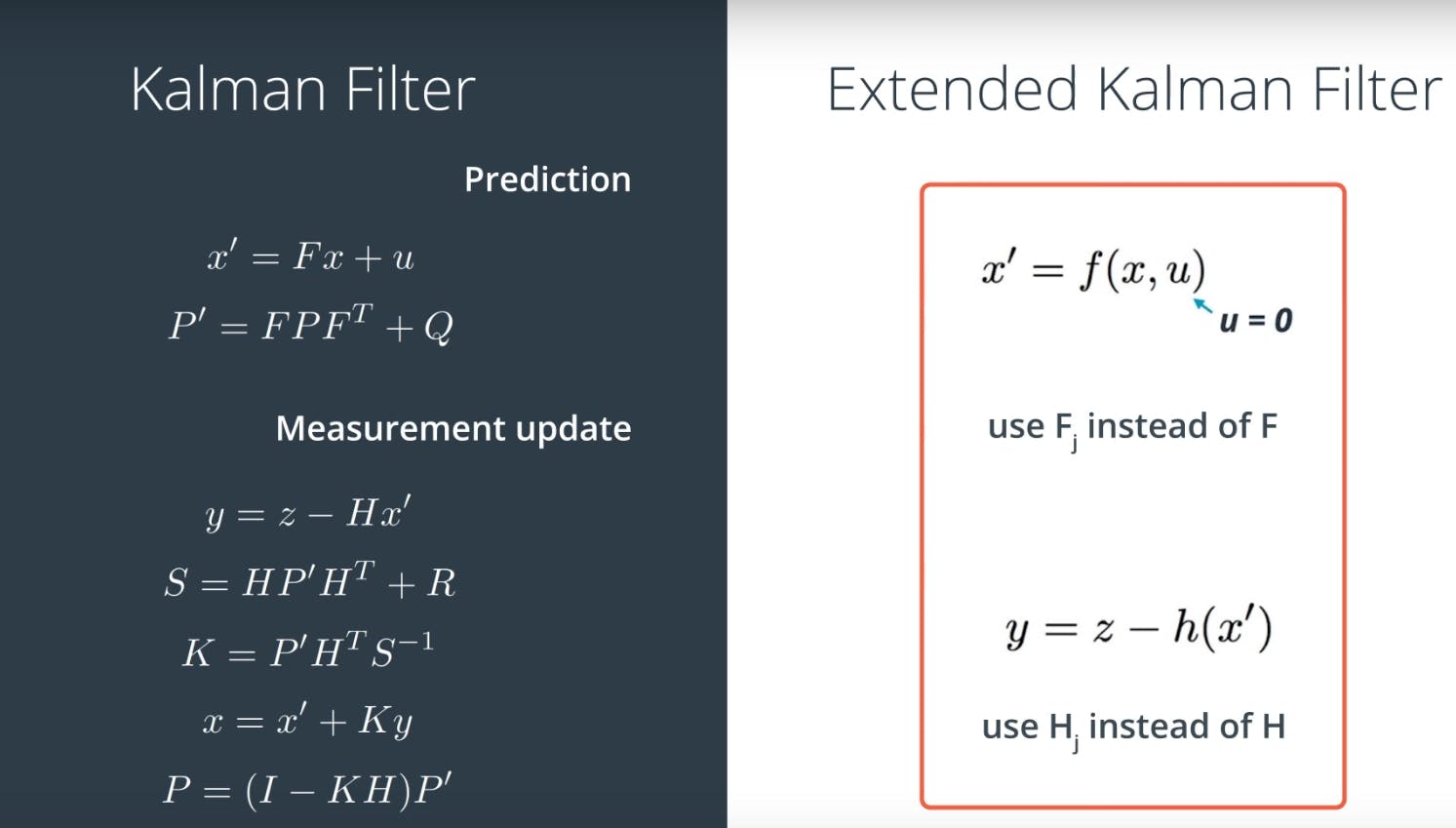
在实践中很多时候使用传感器的组合,然后应用融合算法,例如扩展卡尔曼滤波器,以获得精确的信息。
如果我们回到基础,对于大多数应用程序,您将处理基于 LIDAR 的 SLAM 或视觉 SLAM。基于激光雷达的 SLAM 相对容易设置并且非常精确——Waymo 在其自动驾驶汽车上使用激光雷达是有原因的。

但当然,特斯拉没有这样做是有原因的——激光雷达体积庞大、价格昂贵,而且它们的旋转部件需要在较长时间内运行时进行维护。对于视觉 SLAM,RGB-D 传感器方法也可以非常强大,而简单的立体或单目系统可能很难设置。以下是描述中的更多链接,以详细了解 SLAM!
在本文中,我们将尝试称为 ORB-SLAM2 的单目视觉 SLAM 算法和基于激光雷达的 Hector SLAM。
使用 ORB-SLAM2 的视觉 SLAM
对于 ORB-SLAM2,我们将使用普通的廉价网络摄像头——需要对其进行校准以确定每个摄像头型号所独有的内在参数。我建议使用内置的 ROS 相机校准工具进行校准。要安装这些(您可以安装在您的 Ubuntu PC 上):
sudo apt-get install ros-melodic-camera-calibration
打印校准棋盘,从这里下载。
以毫米为单位测量正方形的边。然后输入以下命令开始校准:
roslaunch usb_cam usb_cam.launch
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/image_raw camera:=/camera
更改 square 参数以匹配校准板上的正方形大小。

为了获得良好的校准,您需要在相机框架中移动棋盘格,以便:
- 相机视野左、右、上、下的棋盘
- X 条 - 视野中的左/右
- Y 条 - 视野中的顶部/底部
- 尺寸栏 - 朝向/远离和倾斜相机
- 相机左侧、右侧、顶部和底部的棋盘 X 栏 - 左侧/右侧在视野中 Y 栏 - 顶部/底部在视野中尺寸栏 - 朝向/远离和倾斜相机
- 棋盘格填满整个视野
- 棋盘向左、右、上和下倾斜(倾斜)
在每一步,保持棋盘静止,直到图像在校准窗口中突出显示。
当应用程序收集到足够的数据时,您将能够按下校准按钮。校准过程可能需要几分钟,所以请耐心等待。成功的校准将导致现实世界中的直边在校正后的图像中显得笔直。校准失败通常会导致空白或无法识别的图像,或不保留直边的图像。
之后你需要借助这个包将相机参数转换成.yaml格式,重命名为head_camera.yaml,放到.ros/camera_info/文件夹下。
有一个将 ORB-SLAM2 集成到 ROS 的包,它还发布了 2D 占用图。安装过程比较复杂,我推荐使用 Ubuntu 18.04 的树莓派镜像作为起点,避免编译很多(很多很多很多)额外的包。
安装 ROS 桌面和必要的依赖项
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install ros-melodic-pcl-ros ros-melodic-image-geometry ros-melodic-octomap-ros ros-melodic-usb-cam
创建 catkin 工作区,安装catkin构建工具并将 ORB_SLAM2_ROS 存储库和 Bittle 驱动存储库克隆到 catkin_ws/src 文件夹
mkdir -p catkin_ws/src && cd catkin_ws/src
git clone https://github.com/rayvburn/ORB-SLAM2_ROS
git clone https://github.com/AIWintermuteAI/bittle_ROS
cd bittle_ROS && git checkout slam
下载词汇文件并将其放在ORB_SLAM2/orb_slam2_lib/Vocabulary文件夹中
wget https://github.com/raulmur/ORB_SLAM2/raw/master/Vocabulary/ORBvoc.txt.tar.gz
然后从 catkin 工作区文件夹中,执行
cd src/ORB-SLAM2_ROS/ORB_SLAM2
sudo chmod +x build*
./build_catkin.sh
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果编译过程冻结,请尝试将交换大小增加到 2 Gb
sudo swapoff -a
sudo fallocate -l 2G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
grep SwapTotal /proc/meminfo
以后如果不需要,可以删除交换文件。成功安装后,运行一个示例以确保它按预期工作:
roslaunch orb_slam2_ros raspicam_mono.launch
需要一个额外的步骤,因为您很可能在无头模式下运行 Raspberry Pi(或其他 SBC),没有屏幕或键盘 - 无论是那个还是您的机器人都非常笨重。因此,我们需要配置 ROS 以在多台机器上工作 - 请查看我之前在 BITtle 系列中的文章,其中详细描述了此过程。
由于 Bittle 驱动程序是用 Python 3 编写的,而 ROS 默认仍使用 Python 2.7,因此我们需要为 Python 3 安装 rospkg 以使它们一起运行。
pip3 install rospkg
一旦你有了 ORB-SLAM2 和Bittle(或你的机器人基地)的软件包,你就可以运行网络摄像头驱动程序了
roslaunch bittle_driver bittle_vslam_robot.launch
它将启动整个系统——机器人驱动程序、网络摄像头节点和 ORB-SLAM2。ORB-SLAM2 需要足够的环境信息来初始化,因此您可以手动移动机器人以避免平移或方向的大变化。ORB-SLAM2 初始化后将开始发布八图。您可以使用控制来移动您的机器人。
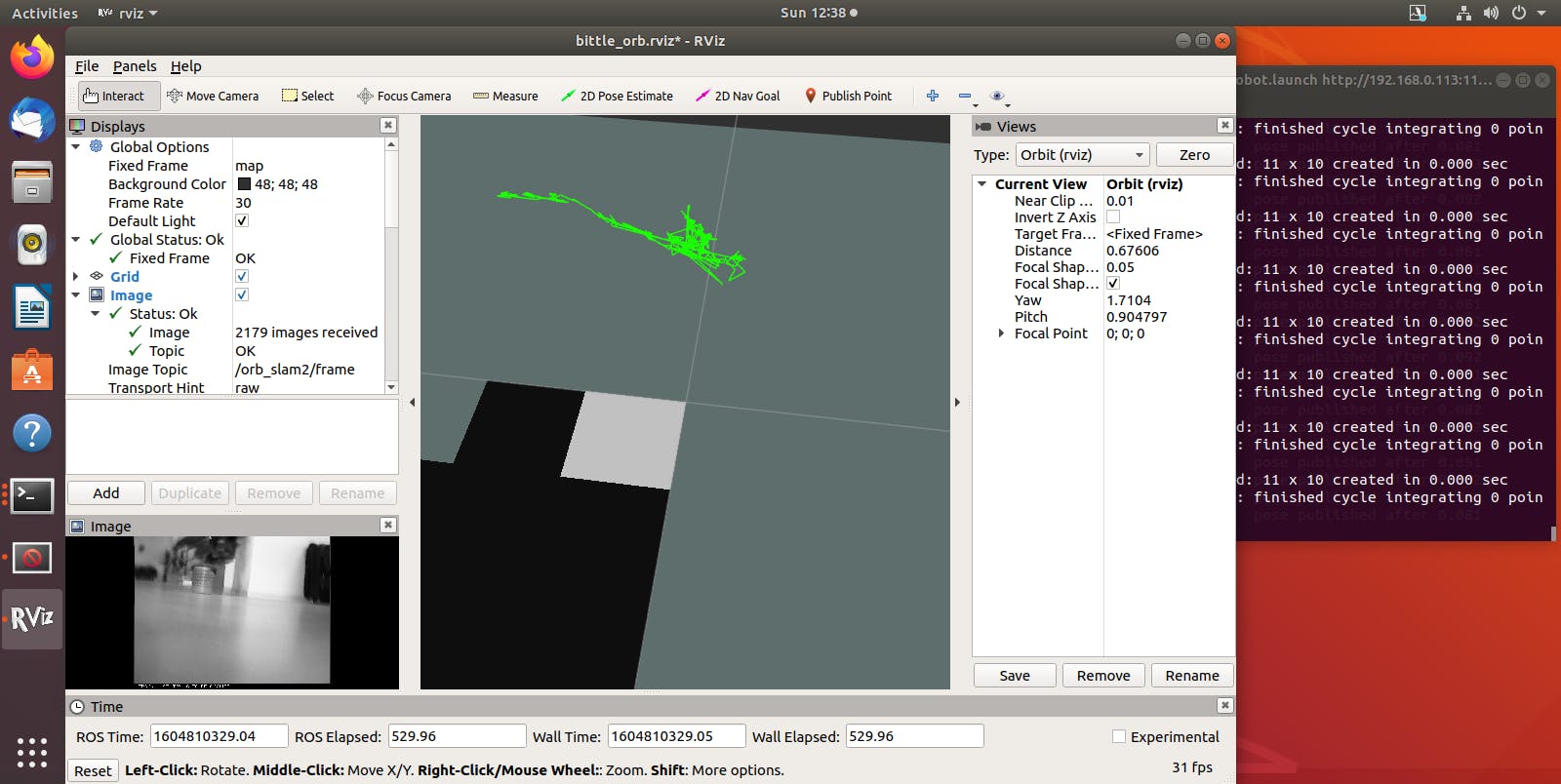
不幸的是,我发现由于 Bittle 上的相机在转动过程中移动得太快,它往往会丢失关键点,需要返回到之前的位置。
可以在这里进行一些改进以使其更稳定
- 使用立体相机
- 使用 ORB-SLAM3 可以集成 IMU 数据以实现更精确的定位
基于激光雷达的 SLAM 与 Hector SLAM
如果 Visual SLAM 对我们的机器人不起作用,那么安装 LIDAR 并尝试一种基于激光扫描仪的算法怎么样?这里的好消息是,对于 LIDAR,我们不需要那么快的处理速度,因此即使是较旧的 Raspberry Pi 3 也可以。坏消息是,即使是小型激光雷达也很大,我可以使用的 RPLIDAR A1M8 重 190 克,当安装在这个有腿机器人的顶部时,它会严重干扰其重心并影响行走步态。

在腹部下方增加了一些额外的重量以平衡事物之后,它可以爬行和行走,尽管我仍然试图小心并避免突然停止。
Hector SLAM的软件安装在 Ubuntu 18.04 上轻而易举。如果您还没有安装 ROS Desktop,请使用以下命令进行安装(与上面关于 Visual SLAM 的第一部分相同):
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install ros-melodic-hector-slam
创建 catkin 工作区,安装catkin构建工具并将 RPLIDAR 存储库和 Bittle 驱动程序存储库克隆到 catkin_ws/src 文件夹
mkdir -p catkin_ws/src && cd catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
git clone https://github.com/AIWintermuteAI/bittle_ROS
cd bittle_ROS && git checkout slam
构建 Bittle 驱动程序包并获取你的 catkin 工作空间
catkin build
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
由于 Bittle 驱动程序是用 Python 3 编写的,而 ROS 默认仍使用 Python 2.7,因此我们需要为 Python 3 安装 rospkg 以使它们一起运行。
pip3 install rospkg
安装完所有这些后,将 ROS 配置为在多台机器上工作。然后运行
roslaunch bittle_driver bittle_lslam_robot.launch
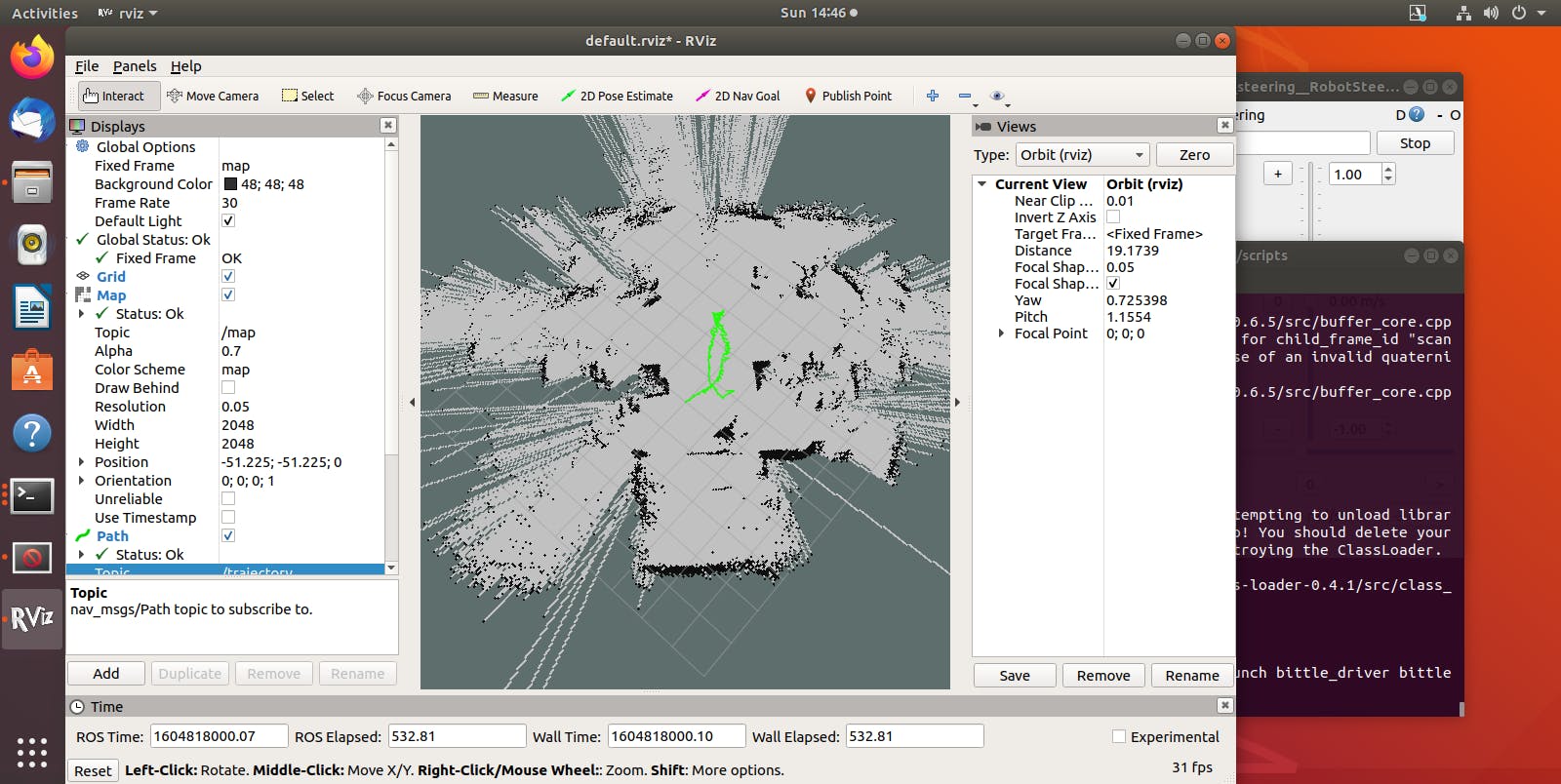
启动 LIDAR、机器人控制和 hector SLAM 节点。总体映射结果看起来比 ORB-SLAM2 好得多,Hector SLAM 甚至可以发布里程计和路径消息,这为使用 ROS 导航堆栈运行自主导航开辟了道路。
对于在 Bittle 上使用 LIDAR 时的改进,
- IMU数据也可以集成
- 步态和平衡算法可以调整以适应机器人顶部的额外重量
- 可以使用更紧凑的激光雷达
这是关于来自 Petoi 的机器狗 Bittle 的系列文章的最后一篇。Kickstarter 活动已经结束,因此,如果您想购买 Bittle,请继续关注 Seeed 工作室子公司 TinkerGen 的预购公告,该公司将在其在线商店和亚马逊上销售 Bittle。
玩得开心建造机器人!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





