
资料下载


使用Huskylens和Edu:bit进行平移和倾斜对象跟踪
分享资料个
描述
嗨,这是我的第一篇 hackster.io帖子。
我支持 DFRobot Huskylens Kickstarter 活动,并在今年年初收到了 AI 相机。从那时起,传感器一直在盒子里保存了几个月,直到最近。
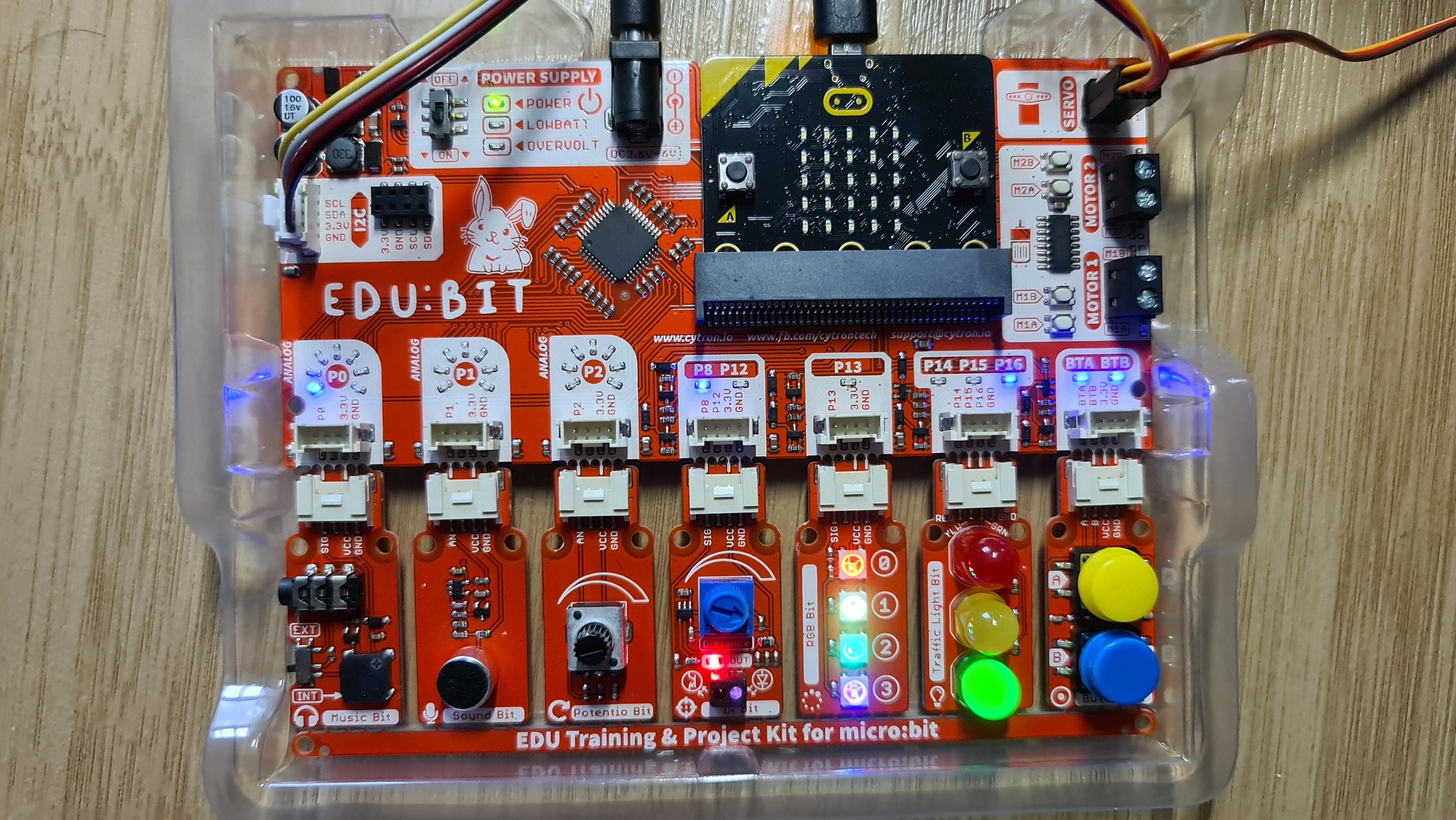
8 月 Cytron Technologies 推出了名为 Edu:bit 的新产品,其中包括 Micro:bit 并包含内置电子元件(电位器、neopixel LED、交通灯 LED、IR 传感器、声音传感器、蜂鸣器、扬声器、伺服和直流电机控制器)。我在发布当天购买了它,以便我可以教我的孩子编码的基础知识,并发现 Microsoft Makecode 中有 Huskylens 扩展。
所以这是我们的项目,它结合了 Huskylens 和 Edu:bit 以及平移和倾斜伺服套件。
该项目的目的是展示物体检测和跟踪如何在 PTZ(平移、倾斜和变焦)闭路电视、无人机云台和相机组合中工作。
Huskylens AI 相机将使用对象检测算法检测对象,并将对象在 320 x 240 屏幕(x 和 y 变量)中的坐标发送到 Micro:bit。
伺服被编程进行校正并将相机移动到相应的方向,以便对象始终位于屏幕的中心。
第 1 步:硬件连接
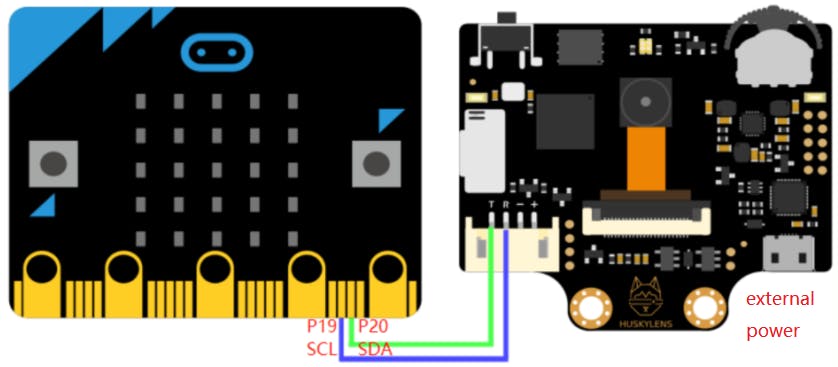
a) Huskylens 到 Edu:bit 通过 I2C
在 Edu:bit Grove 连接器上连接 SDA 和 SDL,分别用于 I2C 到 Huskylens 的 TX 和 RX
b) 伺服到 Edu:bit - 将两个伺服连接到 Edu:bit 上的伺服引脚 1 和 2
第 2 步: 软件
a) 初始化 Huskylens 和伺服位置
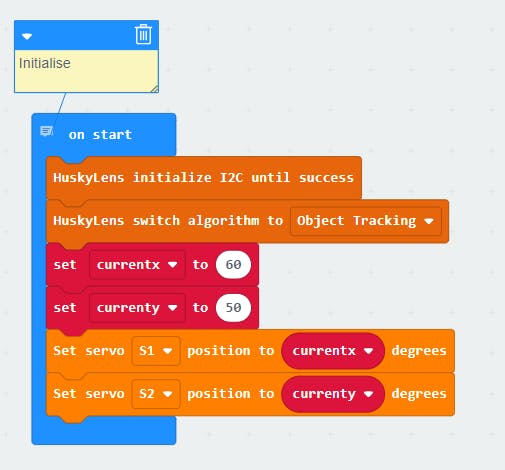
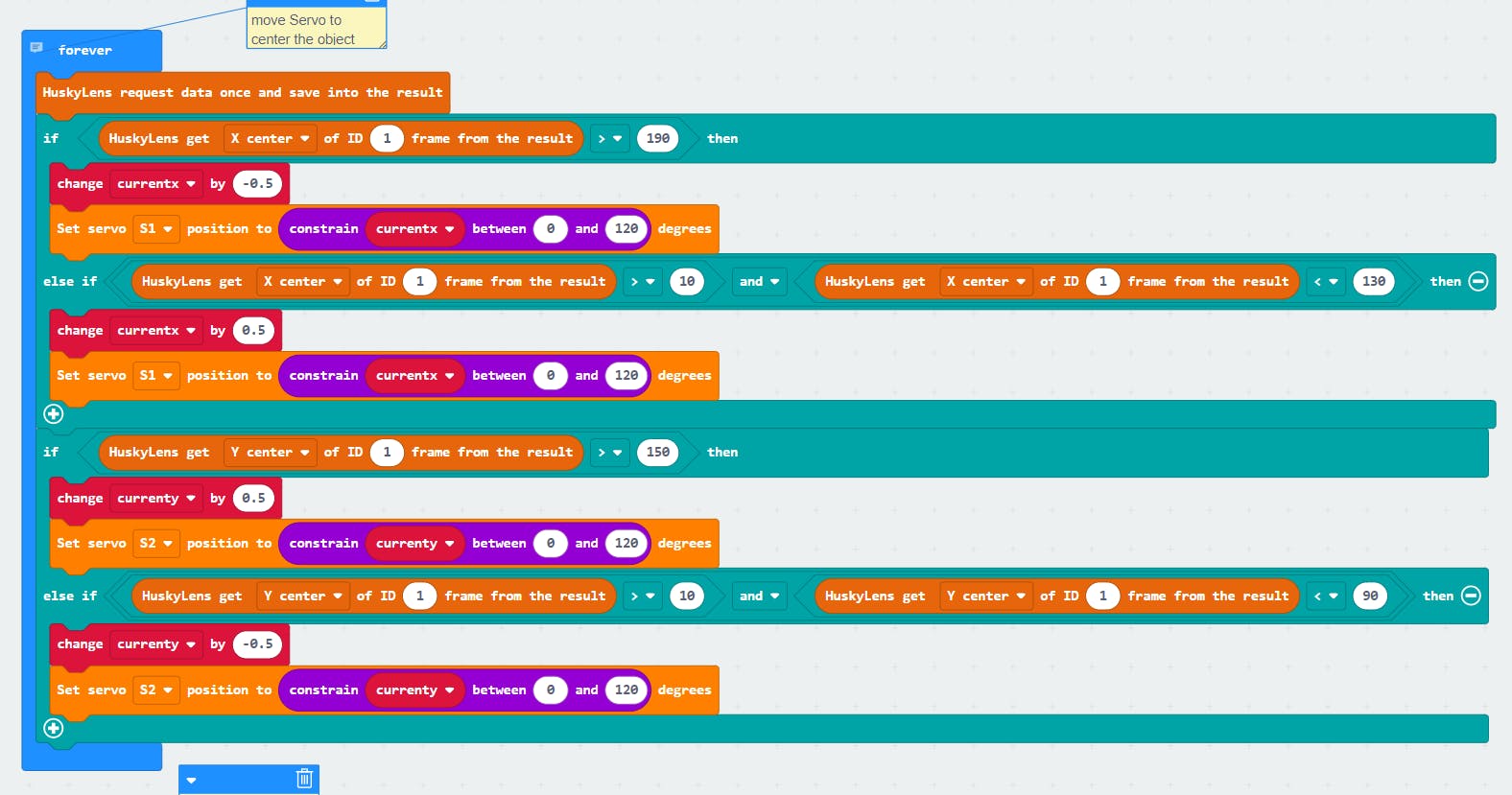
b) 设置条件以根据对象位置移动两个伺服系统(平移或倾斜)
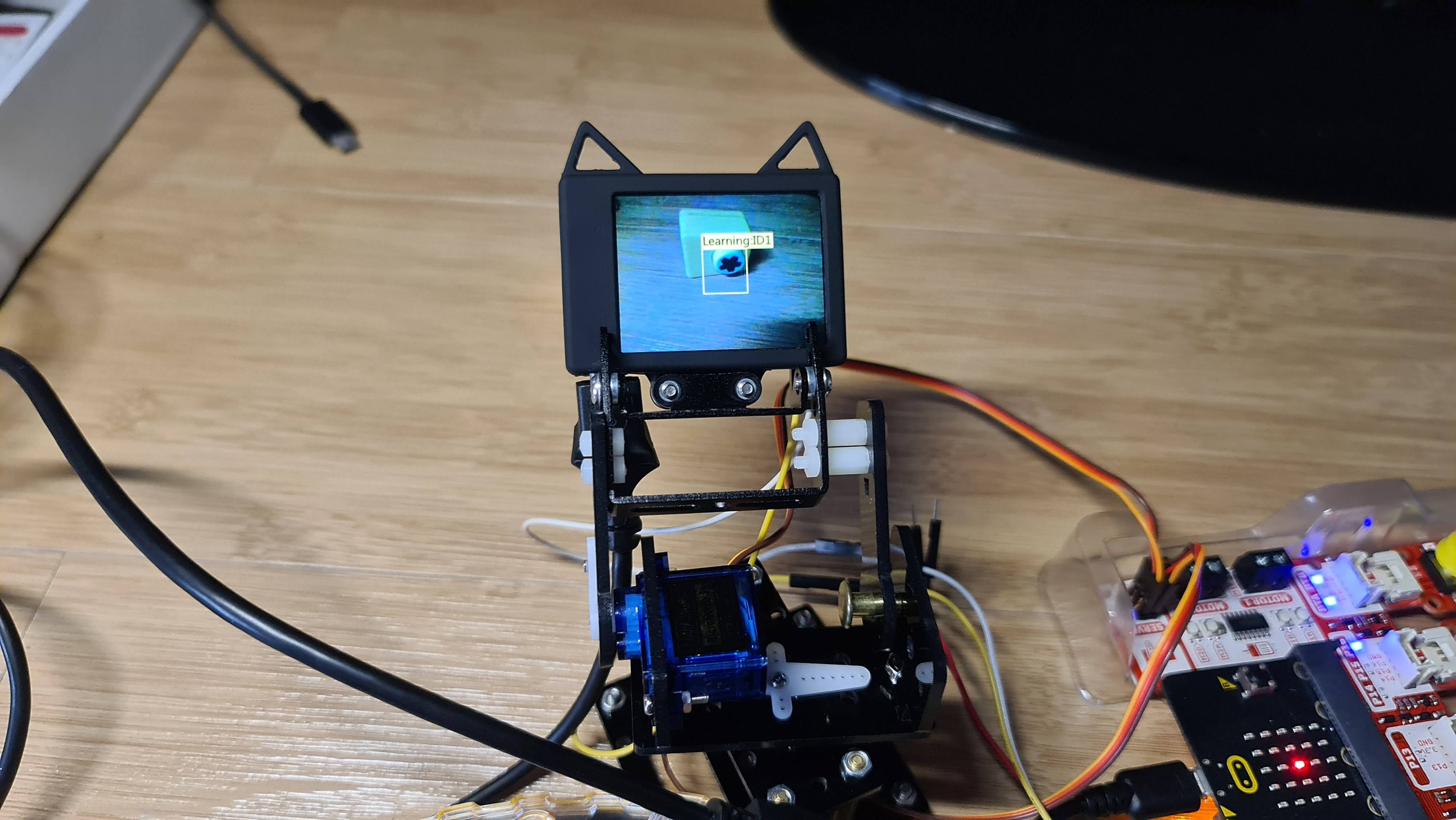
第 3 步:学习对象
a) 在 Huskylens 菜单中选择物体检测,然后点击图像上的学习按钮
b) 测试对象 ID:1 是否被跟踪并显示在屏幕上
第 4 步:跟踪它!
a) 检查接线
b) 将代码下载到 Micro:bit
c) 追踪物体!- 相机将跟随物体,伺服将校正方向,使物体始终位于屏幕中心。
d) 移动物体以测试跟踪机制。
第 5 步:附加功能
a) 使用 Micro:bit plot 函数在 5 x 5 矩阵 LED 上绘制对象的位置。(需要将 320 x 240 屏幕映射到 5 x 5 矩阵 LED)
b) 对象不居中时将 RGB 位和交通灯位更改为红色,居中时更改为绿色
c) 伺服开始校正位置时使用电位器调整中心值,即默认情况下,如果物体x小于120,则校正位置,大于190
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





