
资料下载


永磁同步电机Anti_Windup速度控制器设计
二林
分享资料个
主要针对永磁同步电机( PMSM) 磁场定向控制系统中存在非线性饱和问题,分析了 PI 电机速度控制器 Windup 现象产生的过程及危害。对传统的 Anti-reset Windup PI 控制器进行了改进,将比例环节和积分环节对饱和影响进行了分离,从而使反馈补偿更为准确,有效提升了电机控制系统性能。通过仿真验证了可行性,并将其应用于所开发 PMSM 驱动控制系统中,在工程应用中取得了很好的控制效果,进一步验证了控制策略的可行性。
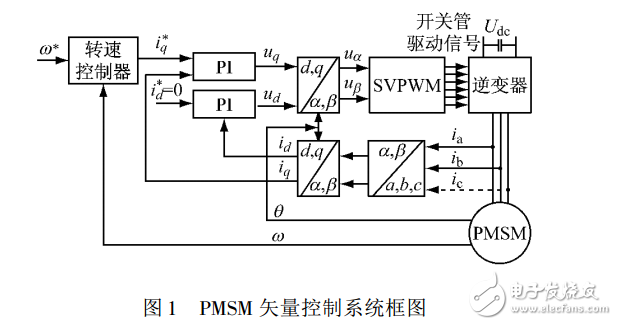
由于永磁同步电机( Permanent Magnet Synchronous Motor,PMSM) 相对异步电机具有结构紧凑、体积小、重量轻、转动惯量小和高效率等优点,在工业生产、民用生活和航空航天及军事国防等领域的应用越来越普遍。在 PMSM 控制中,为了提高控制精度,消除稳态误差,PMSM 速度控制往往引入较大积分环节,这必然会使电机控制系统出现 Windup 现象[1-3]。该现象将会引起电机控制系统输出超调增大,稳定时间变长,系统动态性能变差。为了克服 Windup 现象,避免由于该现象出现对系统性能造成的影响,必须进行抗饱和控制器( Anti-Windup) 设计,即在控制器设计中对积分环节进行限制。
目前,Anti-Windup 控制主要可分为条件积分法[4-7]和反计算法[4-7]。条件积分法鉴于 Windup 现象是由积分环节所引起的,故采取停止或限制积分等手段,避免 Windup 发生。该方法主要优点是简单易用,缺点是调整困难。反计算法主要是将限幅控制器输出和被控制对象输入作比较,并用此差值信号作为反馈信号构建反馈支路以抑制 Windup 现象。由于该方法是线性结构,设计简便易于应用。
本文主要针对 PMSM 控制系统工程开发需要,对传统反计算 Anti-Windup 控制器进行了改进,改进后控制器将积分和比例环节对饱和特性影响的信号进行了分离,从而可充分发挥比例环节在控制系统的作用,提升控制系统动态性能。通过计算机仿真验证了该方案的可行性,并将该方案应用于所开发的 PMSM 控制系统中,进一步验证了该方案的实际工程价值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




