
资料下载


×
pid控制原型
消耗积分:0 |
格式:docx |
大小:173KB |
2017-06-20
吴迪
分享资料个
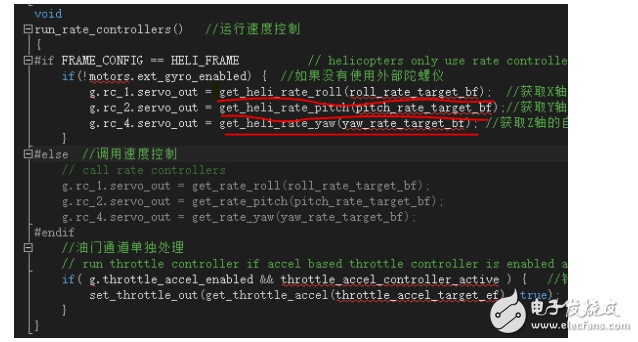
APM中用PID控制roll,pitch,yaw三个轴,
从apm的void loop()函数进入主要循环的static void fast_loop(),再进入run_rate_controllers()函数,该函数主要进行速度的控制,采用PID控制,函数原型如下:
get_heli_rate_roll(roll_rate_target_bf);
get_heli_rate_pitch(pitch_rate_target_bf);
get_heli_rate_yaw(yaw_rate_target_bf);
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




