
资料下载


×
快速原型智能车系统的设计
消耗积分:0 |
格式:rar |
大小:0.2 MB |
2017-11-15
分享资料个
专用 赛车将用较大的新 车,采用 Motorola 的S12系列芯片, 但一般的开发模式存 在效率不高,成本高以及开发周期长等缺 陷,因此决定采用快 速原型的开发方法, 以一辆样车为载体, 将智能车原有的控制 核心替换为NI 公 司的CompactRIO, 并通过各种IO模块 进行光电传感器和转 速传感器的采集以及 驱动电机、舵机的控 制。从而可以方便地 将算法下载到CRIO 中进行原 机试验,取得最优结 果后再移植到 S12 芯片中。
快速原型智能车系统 如图1 所示:
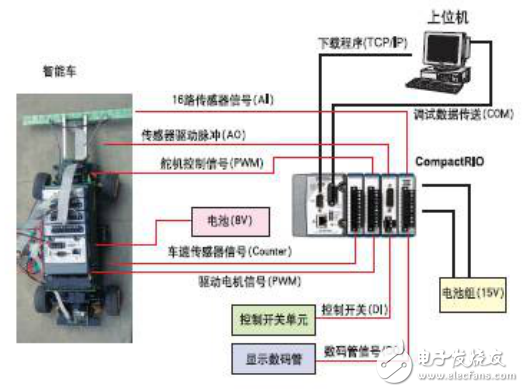
将 CompactRIO 安装在智能车底盘 上,并连上一个 15V的电池组。 CompactRIO 的4 个IO模块负 责采集智能车传感器信号以及控制电机、 舵机等执行器。此 外,还配有控制开关 单元来进行手动控 制,数码管实时显示 赛车信息,并可在试验结束后将所需要的 数据通过串口传到上 位机中,从而进行分 析和保存。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





