
资料下载


×
基于MOST的先进驾驶辅助系统解析
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-11-21
分享资料个
高效的通信网络是分布式先进驾驶辅助系统(ADAS)的主要组成部分。分析在不同系统参数下的不同场景中的这类系统是一项非常复杂的任务。在早期设计阶段评估关键系统参数以实现最佳系统行为非常重要。本文将讨论一种基于虚拟原型的评估架构,它可以用来评估基于MOST的先进驾驶辅助系统。
汽车中先进驾驶辅助系统(ADAS)的数量在不断增加。这些系统处理来自多种传感器的信息,比如雷达传感器、摄像机或全球定位系统(GPS),然后为驾驶提供帮助。因为这些传感器在全车各个地方都有分布,因此需要一个高效的数据通信网络来共享不同ADAS之间的信息。另外,这些系统经常要求诸如快速傅里叶变换或霍夫变换等处理算法。拥有一个专门的预处理节点执行这种通用任务是有好处的,这种节点可以采用最优化的硬件架构。不过这会提高对分布式ADAS网络的要求。通过优化通信网络可以减少布线的数量。MOST通信网络可以提供这类任务所需的许多功能。
MOST网络技术可以提供种类繁多的配置方案。为了找到最优的解决方案,必须对这些方案进行评估,并且最好是在早期设计阶段完成。为了支持这些评估,本文推荐一种基于虚拟原型的评估架构。它能减少这种基于网络的分布式应用的评估复杂性。
评估架构——ADAS使用案例
本文讨论的评估架构支持功能和时序验证、性能和可靠性分析,并支持设计空间开发。架构的主要关注点之一是模块化特性以及可用于分析各种不同系统方案的通用方法。基于虚拟原型的架构是由众多的基本模块构建的。这些模块汇聚起来形成想要的系统,比如ADAS用例就是用大约150个模块实例组装而成的。功能提取如图1所示。这种方案能够方便地改变系统,例如只需用合适的模块替换或扩展现有系统就能改变通信通道。借助这种方法可以很容易地使用已有的IP组件集成新的应用。虚拟系统是用XML文件配置的,因此能够在运行时期间方便地完成模块的组装和配置。
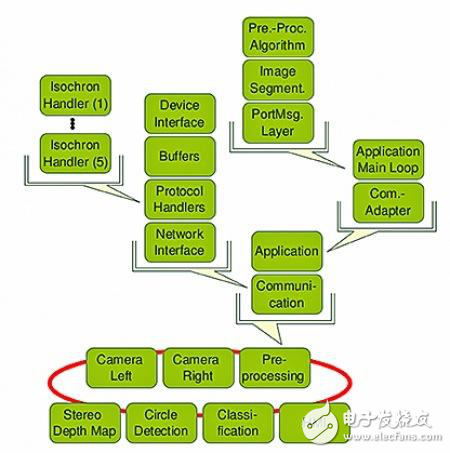
图1:虚拟原型的模块化结构
分布式ADAS用例包含:
。两个摄像机
。一个预处理器模块
。一个圆周检测模块
。一个速度标志分类模块
。一个立体深度图计算模块
。一个人机界面(HMI)
系统包含两个ADAS功能:立体深度图(SDM)和交通标志识别(TSR)。这两个系统功能共享公共的摄像机和图像预处理模块。通信网络必须转发多种不同的图像流,包括原始摄像图像,预处理后的图像,检测到的圆周剪辑,立体深度图或分类的速度值。根据模块所发挥的作用,对基本通信网络的要求是不同的。举例来说,预处理模块要求1至n的通信组合来应对多个接收器。摄像机图像流提供连续的数据流。另一方面,剪辑过的交通标志以突发的方式出现。为了揭示这种通信技术的影响,需要详细分析立体深度图应用的摄像机数据流。
通信技术对应用的影响
立体深度图的计算需要同步发送两个预处理后的摄像机图像。如果图像没有与诸如顺序号等额外信息取得关联,那么接收缓冲器就有必要包含连续同步的摄像机图像。因此,通信网络必须确保左右摄像机图像在两次顺序读取操作之间总能成对发送。不同种类的通信网络可能会影响到这种行为。由于比如具有不确定性访问行为的共享通信通道而存在置换的可能性。不同通道类型或通道的使用可能导致不同的时延,进而导致使用老的图像实例。
汽车中先进驾驶辅助系统(ADAS)的数量在不断增加。这些系统处理来自多种传感器的信息,比如雷达传感器、摄像机或全球定位系统(GPS),然后为驾驶提供帮助。因为这些传感器在全车各个地方都有分布,因此需要一个高效的数据通信网络来共享不同ADAS之间的信息。另外,这些系统经常要求诸如快速傅里叶变换或霍夫变换等处理算法。拥有一个专门的预处理节点执行这种通用任务是有好处的,这种节点可以采用最优化的硬件架构。不过这会提高对分布式ADAS网络的要求。通过优化通信网络可以减少布线的数量。MOST通信网络可以提供这类任务所需的许多功能。
MOST网络技术可以提供种类繁多的配置方案。为了找到最优的解决方案,必须对这些方案进行评估,并且最好是在早期设计阶段完成。为了支持这些评估,本文推荐一种基于虚拟原型的评估架构。它能减少这种基于网络的分布式应用的评估复杂性。
评估架构——ADAS使用案例
本文讨论的评估架构支持功能和时序验证、性能和可靠性分析,并支持设计空间开发。架构的主要关注点之一是模块化特性以及可用于分析各种不同系统方案的通用方法。基于虚拟原型的架构是由众多的基本模块构建的。这些模块汇聚起来形成想要的系统,比如ADAS用例就是用大约150个模块实例组装而成的。功能提取如图1所示。这种方案能够方便地改变系统,例如只需用合适的模块替换或扩展现有系统就能改变通信通道。借助这种方法可以很容易地使用已有的IP组件集成新的应用。虚拟系统是用XML文件配置的,因此能够在运行时期间方便地完成模块的组装和配置。
图1:虚拟原型的模块化结构
分布式ADAS用例包含:
。两个摄像机
。一个预处理器模块
。一个圆周检测模块
。一个速度标志分类模块
。一个立体深度图计算模块
。一个人机界面(HMI)
系统包含两个ADAS功能:立体深度图(SDM)和交通标志识别(TSR)。这两个系统功能共享公共的摄像机和图像预处理模块。通信网络必须转发多种不同的图像流,包括原始摄像图像,预处理后的图像,检测到的圆周剪辑,立体深度图或分类的速度值。根据模块所发挥的作用,对基本通信网络的要求是不同的。举例来说,预处理模块要求1至n的通信组合来应对多个接收器。摄像机图像流提供连续的数据流。另一方面,剪辑过的交通标志以突发的方式出现。为了揭示这种通信技术的影响,需要详细分析立体深度图应用的摄像机数据流。
通信技术对应用的影响
立体深度图的计算需要同步发送两个预处理后的摄像机图像。如果图像没有与诸如顺序号等额外信息取得关联,那么接收缓冲器就有必要包含连续同步的摄像机图像。因此,通信网络必须确保左右摄像机图像在两次顺序读取操作之间总能成对发送。不同种类的通信网络可能会影响到这种行为。由于比如具有不确定性访问行为的共享通信通道而存在置换的可能性。不同通道类型或通道的使用可能导致不同的时延,进而导致使用老的图像实例。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





