
资料下载


×
车载网的新型定位算法
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-29
分享资料个
自从人们把解决交通拥塞和交通事故的目标转向车载自组织网以来,车载网已成为国内外研究的热点课题。对高速运动的车载来说,车载网是否具有精确实时的定位能力,成为解决一切问题的基础。Hohman等人利用GPS接收机设计了一个只有2 cm定位误差的导航系统[1],但他们并没有考虑在一些不能使用GPS的区域,如隧道。张传斌等人则把UKF滤波方法应用到车载导航中[2],但UKF滤波方法计算量大,难以满足高速公路上实时性要求很高的车载定位跟踪系统。针对以上问题,本文提出了一种计算量小且实时性较高的车载网定位跟踪算法。
1 单基站车载定位跟踪数学模型
1.1单基站方位时差联合(BTO)定位
在单基站车载定位跟踪系统中,发射基站用T表示,接收基站用R表示,只要接收站能收到信息就可以完成对车载的定位和跟踪。如图1所示,发射站T和接收站R是固定设备,它们装载在路边设施(RSU)上并且假设车载相对于路面是零高度行驶。RL是基线,测量其与车载回波方位的夹角?兹R,发射站T发射的信号经过车载最后到达接收站同发射站T发射的信号直接到达接收站的时间差为?驻Tn,多普勒频移为fd[3]。
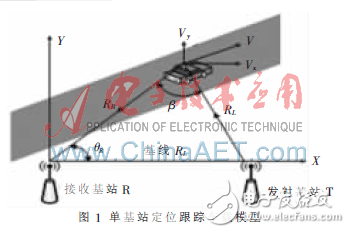
基线RL可通过测量工具获得其精确值,接收基站上的传感器只需测得车载回波方位角?兹R和发射基站直接到达基站的时间差?驻Tn就能对车载进行定位跟踪。
发射基站与接收基站的距离RL、车载与发射基站的距离RT和车载与接收基站RR的关系为:

3 仿真
为了考察SUKF算法的滤波性能,本次仿真对SUKF、EKF、UKF算法进行仿真比较。由于SUKF算法主要是简化UKF算法,因此本次仿真除了对仿真精度进行比较分析外,还将对各种算法的改进率等进行统合比较分析。
1 单基站车载定位跟踪数学模型
1.1单基站方位时差联合(BTO)定位
在单基站车载定位跟踪系统中,发射基站用T表示,接收基站用R表示,只要接收站能收到信息就可以完成对车载的定位和跟踪。如图1所示,发射站T和接收站R是固定设备,它们装载在路边设施(RSU)上并且假设车载相对于路面是零高度行驶。RL是基线,测量其与车载回波方位的夹角?兹R,发射站T发射的信号经过车载最后到达接收站同发射站T发射的信号直接到达接收站的时间差为?驻Tn,多普勒频移为fd[3]。
基线RL可通过测量工具获得其精确值,接收基站上的传感器只需测得车载回波方位角?兹R和发射基站直接到达基站的时间差?驻Tn就能对车载进行定位跟踪。
发射基站与接收基站的距离RL、车载与发射基站的距离RT和车载与接收基站RR的关系为:
3 仿真
为了考察SUKF算法的滤波性能,本次仿真对SUKF、EKF、UKF算法进行仿真比较。由于SUKF算法主要是简化UKF算法,因此本次仿真除了对仿真精度进行比较分析外,还将对各种算法的改进率等进行统合比较分析。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




