
资料下载


×
基于完整可见性模型的改进鲁棒OctoMap应用与地图定位及创建
消耗积分:2 |
格式:rar |
大小:0.87 MB |
2017-12-03
分享资料个
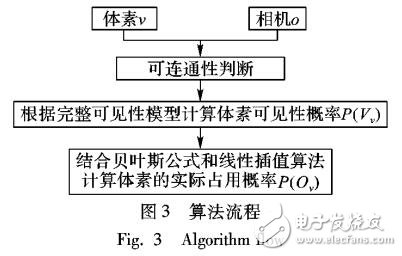
从移动机器人自主导航对3D地图精度的需求出发,在鲁棒OctoMap的基础上提出一种基于完整可见性模型的改进鲁棒OctoMap并应用于基于Kinect的RCB-D同时定位与地图创建(SLAM)中。首先,通过考虑相机和目标体素的相对位置关系及地图分辨率进行可连通性判断,获得满足可连通性的相邻体素的个数及位置;其次,根据不同的可连通性情况分别建立目标体素的可见性模型,从而构建普适性更强的完整可见性模型,有效克服了鲁棒OctoMap可见性模型的局限性,提高了建图精度;再次,使用基于高斯混合模型的Kinect深度误差模型代替简单深度误差模型,进一步克服传感器测量误差对地图精度的影响,降低了地图的不确定性;最后,结合贝叶斯公式和线性插值算法来更新八又树中每个节点的实际占用概率,从而构建基于八又树的立体占用地图。实验结果表明,所提方法有效克服了Kinect传感器深度误差对地图精度的影响,降低了地图的不确定性,其建图精度较鲁棒OctoMap有明显的提高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




