
资料下载


×
提高步进电机运行质量有技巧,电流控制藏猫腻
消耗积分:1 |
格式:rar |
大小:0.6 MB |
2017-12-10
分享资料个
双极性步进电机的基础知识
双极性步进电机包含两绕组,为了使电机运行平稳,不断的给这两个线圈加以相位差90度的正弦波,步进电机就开始转动起来。
通常,步进电机不是由模拟线性放大器驱动;而是由PWM电流调节驱动,把线性的正弦波信号转换成了离散的直线段信号。 正弦波可被分成多段,随着段数的增加,波形不断接近正弦波。 实际应用中,段数多从4到2048或更多,大多数步进驱动IC采用4到64段细分。整步驱动,每一时刻只有一个相通电,两相电流交替和电流方向切换,使得一共产生四个步进电机机械状态。半步驱动,比整步驱动方式相对复杂一些,在同一时刻,可能两个相都需要被通电,如图1所示,使电机的步进分辨率提高了一倍。细分驱动,电机转子走一步的角度将会随着细分数的增加而减小,电机转动也越来越平稳,例如把一个32段细分序列称为八分之一步驱动模式(见图1)。
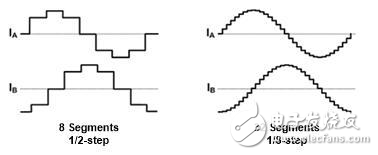
图1:细分驱动的电流波形。
电流控制精度的重要性
双极性步进电机转子的位置取决于流经两个线圈绕组的电流的大小。通常,选择步进电机的主要指标为,准确的机械定位或精准的机械系统速度控制。所以绕组电流的精度控制对步进电机的平稳运行非常重要。
在机械系统中,有两个问题会导致不准确的电流控制:
在低速运行或用步进电机用于定位控制的情况下,每一细分段电机运行的步数错误,导致错误的定位。
在高速运行下,系统非线性会导致短期电机运行速度变化,使得力矩不稳,增加了电机噪声和振动。
PWM控制和电流衰减模式(Decay Mode)
大多数的步进电机驱动IC,依靠步进电机绕组的电感特性实现PWM电流调节。通过每个绕组对应的功率MOSFET组成的H桥电路,随着PWM控制开始,电源电压被加到电机绕组上,从而产生驱动电流。一旦电流达到设定值,H桥就会切换控制状态,使得输出电流衰减。 一定固定时间后,一个新的PWM周期又会开始,H桥再次产生线圈电流。
重复这一过程,使绕组电流上升和下降。通过电流采样和状态控制,可以调节控制每一段细分的峰值电流值。
在预期的峰值电流达到后,H桥驱动绕组的电流衰减控制方式有两种:
绕组短路(同时开通低侧或高侧的MOSFET),电流衰减慢;
H桥反向导通,或允许电流通过MOSFET的体二极管流通,电流衰减快。
双极性步进电机包含两绕组,为了使电机运行平稳,不断的给这两个线圈加以相位差90度的正弦波,步进电机就开始转动起来。
通常,步进电机不是由模拟线性放大器驱动;而是由PWM电流调节驱动,把线性的正弦波信号转换成了离散的直线段信号。 正弦波可被分成多段,随着段数的增加,波形不断接近正弦波。 实际应用中,段数多从4到2048或更多,大多数步进驱动IC采用4到64段细分。整步驱动,每一时刻只有一个相通电,两相电流交替和电流方向切换,使得一共产生四个步进电机机械状态。半步驱动,比整步驱动方式相对复杂一些,在同一时刻,可能两个相都需要被通电,如图1所示,使电机的步进分辨率提高了一倍。细分驱动,电机转子走一步的角度将会随着细分数的增加而减小,电机转动也越来越平稳,例如把一个32段细分序列称为八分之一步驱动模式(见图1)。
图1:细分驱动的电流波形。
电流控制精度的重要性
双极性步进电机转子的位置取决于流经两个线圈绕组的电流的大小。通常,选择步进电机的主要指标为,准确的机械定位或精准的机械系统速度控制。所以绕组电流的精度控制对步进电机的平稳运行非常重要。
在机械系统中,有两个问题会导致不准确的电流控制:
在低速运行或用步进电机用于定位控制的情况下,每一细分段电机运行的步数错误,导致错误的定位。
在高速运行下,系统非线性会导致短期电机运行速度变化,使得力矩不稳,增加了电机噪声和振动。
PWM控制和电流衰减模式(Decay Mode)
大多数的步进电机驱动IC,依靠步进电机绕组的电感特性实现PWM电流调节。通过每个绕组对应的功率MOSFET组成的H桥电路,随着PWM控制开始,电源电压被加到电机绕组上,从而产生驱动电流。一旦电流达到设定值,H桥就会切换控制状态,使得输出电流衰减。 一定固定时间后,一个新的PWM周期又会开始,H桥再次产生线圈电流。
重复这一过程,使绕组电流上升和下降。通过电流采样和状态控制,可以调节控制每一段细分的峰值电流值。
在预期的峰值电流达到后,H桥驱动绕组的电流衰减控制方式有两种:
绕组短路(同时开通低侧或高侧的MOSFET),电流衰减慢;
H桥反向导通,或允许电流通过MOSFET的体二极管流通,电流衰减快。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






