
资料下载


如何使用CPGs实现双足机器人的行走规划与控制
分享资料个
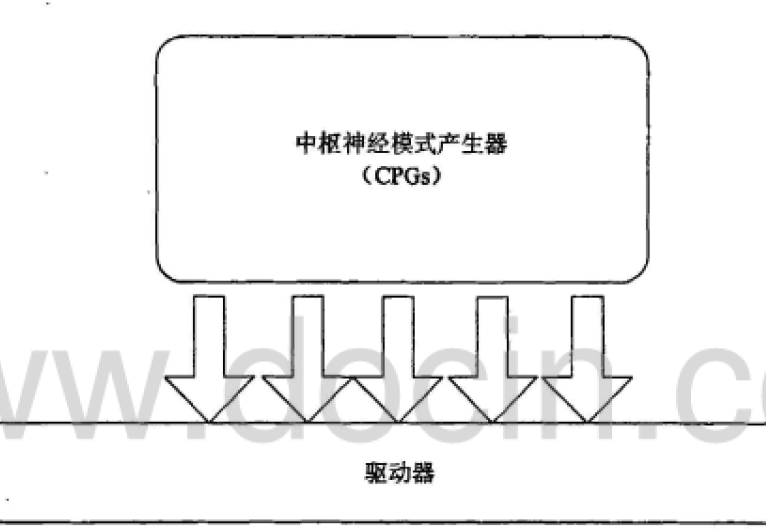
仿人形机器人是当今世界高新技术研究领域的一个热点,而仿人形机器人行走的规划与实现则是该领域的一个重要的,乃至有关整个领域发展前途的关键性的问题。经过几百万年的进化后,对人类而言像步行、奔跑这样的运动早已习以为常。表面上看这种双足运动形式很简单,但是研究者研究后发现要想在仿人形机器人身上实现类似于人类那样自由、稳定、快速的行走并不是一件容易的事情。研究者们探索了许多种不同的方法,结果与期望还是相差甚远。 近年来随着人们对人类步行本质的深入理解和神经生理学的不断发展,基于神经生理学的控制算法在仿人形步行机器人的运动控制中得到了广泛的应用。基于中枢神经模式产生器(Central Pattern Generators,CPGs)的仿人形机器人运动控制算法作为一种以神经生理学为基础的智能控制算法逐渐得到众多研究者的重视。 本文就是基于CPGs的仿人形机器人运动控制算法的研究。研究了由Hopf振荡器和Matsuoka振荡器构成的CPGs网络,并通过遗传算法优化CPGs网络的参数以产生可供双足步行机器人行走的步态数据。论文中首先介绍了Hopf振荡器和Matsuoka振荡器的数学模型以及它们的一些性质,然后分别用这两种振荡器模型设计了两种CPGs网络,紧接着分析了如何用稳态遗传算法去优化这两种设计好的CPGs网络的参数,最后对仿真结果的进行了分析和并给出了进一步工作的展望。实验结果表明在没有外界干扰的情况下,CPGs网络产生的步态数据能够用来控制Webots3D仿真环境中双足机器人稳定的行走。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





