
资料下载


双闭环单神经元PID控制器的四旋翼飞行器航迹控制
分享资料个
随着计算机技术和智能控制技术的不断发展,四旋翼飞行器因其结构简单、垂直起降和低速飞行等诸多优点,在越来越多的领域拥有广泛的应用前景。四旋翼飞行器是由4个电动桨叶组成,相邻桨叶旋转相反方向抵消扭矩。它既可以使用无线电遥控设备进行手动飞行,也可以使用远程计算机与导航设备控制进行飞行。与传统的飞行器相比,具有负载能力强、机械操作简单和作业范围广泛等优点。四旋翼飞行器采用点到点的飞行方式,包括旋进、悬停、偏航、横滚、俯仰、垂直和水平飞行。在军用和民用领域都得到广泛的应用。在军用方面主要进行侦查、监视、获取敌方情报和地面通讯等工作;在民用方面主要进行空中摄影、图像传输、交通监控、电力巡检和大气检测等工作。
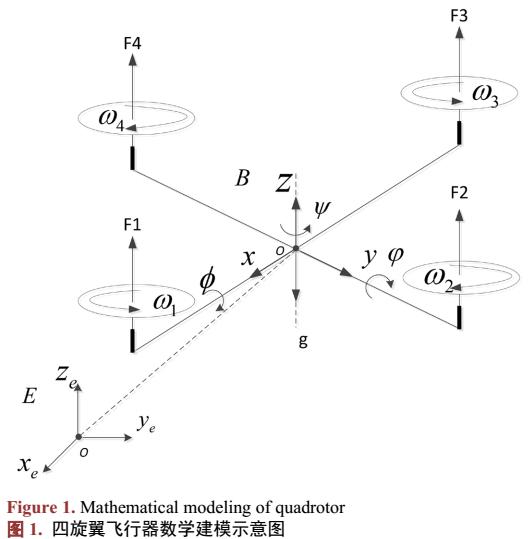
目前,对于四旋翼飞行器的控制器选择,通常采用PID控制器。PID控制器作为经典的反馈控制,其有设计简单、鲁棒性强和稳定性高等优点,被应用于各种各样的生产环境。但自适应性和参数整定方面表现很差,也限制算法的发展。丁军,姚乐和杨启文等采用单神经元对PID算法做出改进,并分析改进后算法的合理性。侯一民,高京都等将改进后的算法应用于实际应用中。本文采用牛顿欧拉公式建立简化的数学模型,并根据飞行器运动合力与单神经元整定PID控制器结合对加速度控制,建立姿态控制、位置控制的双闭环控制系统,实现对飞行器运动跟踪及预测,并通过simulink仿真实验,论证算法的实时性、准确性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




