
资料下载


×
基于虚拟仿真的热喷涂轨迹规划方法
消耗积分:1 |
格式:rar |
大小:0.44 MB |
2018-04-24
分享资料个
随着现代机械行业的迅猛发展,对所用材料的性能要求不断提高,其中,工件表面热喷涂是一种综合效益较高的技术。随着机器人控制速度和精度的不断提高,由工业机器人去完成对工件表面喷涂作业已经使用的愈发广泛。
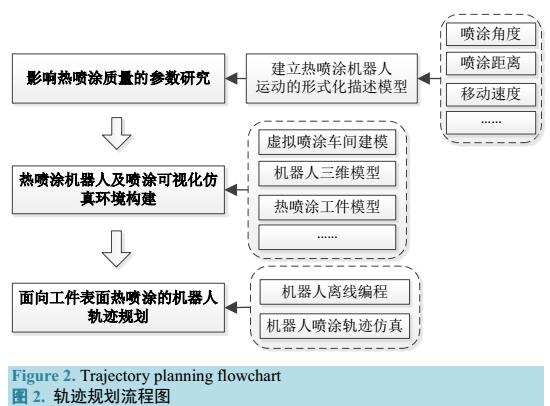
早期的热喷涂机器人编程主要是利用示教编程,将机器人设置为手动操作模式,在喷涂工件上设定机器人运动轨迹所经过的若干个点,程序员操作机器人以设定好的参数运动到每一个点上,并即时记录下机器人上显示的每个点的坐标,通过对各离散点的拟合组成机器人的运动轨迹。这种方法对于简单几何体可以满足喷涂需求,但并不普适于复杂工件表面,存在运动轨迹精度低、喷涂效果不理想等问题。针对机器人热喷涂过程中存在的问题,为得到较为理想的工件表面喷涂轨迹,本文将分析影响喷涂质量的重要参数,构建热喷涂机器人及喷涂可视化仿真的虚拟环境,提出面向工件表面热喷涂的机器人空间轨迹规划的方法,基于热喷涂机器人离线编程,实现热喷涂机器人的轨迹规划。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





