
资料下载


TOF飞行时间相机的原理是什么使用方法和应用的详细资料概述
Ferri
分享资料个
本章介绍了飞行时间深度测量的原理和难点。由飞行时间摄像机产生的深度图像存在特征问题,其被分为以下两类。首先,存在与传感器直接相关的系统误差,如噪声和模糊性。其次,存在非系统误差,如散射和运动模糊,这与场景内容更强烈相关。结果表明,这些误差通常与普通彩色图像中观察到的误差大不相同。运动模糊的情况,这是特别有问题的,详细检查。提出了一种用于研究深度相机性能的实用方法。将飞行时间器件与结构光系统进行比较,研究了镜面材料和半透明材料所带来的问题。
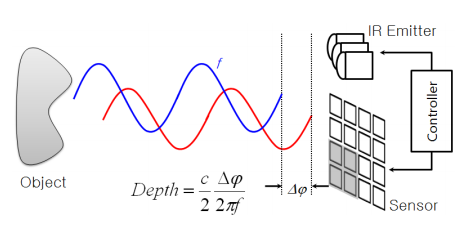
飞行时间(TOF)摄像机产生深度图像,每个像素将距离编码到场景中的对应点。这些摄像机可以直接用于估计3D结构,而不需要传统的计算机视觉算法的帮助。这种新的传感方式有许多实际应用,包括机器人导航(119, 98, 82)、三维重建(57)和人机交互(32, 107)。TOF相机通过测量反射红外(IR)光的相位延迟来工作。这不是估计深度的唯一方法,例如,红外结构光图案可以投射到场景中,以便于视觉三角测量(106)。这种类型的设备,如Kinect 39,与TOF相机88, 105, 90共享许多应用,28, 97。TOF相机的独特的传感结构意味着原始深度图像包含系统和非系统的偏倚,必须解决鲁棒深度成像(37)。具体而言,存在深度精度低和空间分辨率低的问题,以及存在误差的问题。辐射、几何和照明变化。例如,测量精度受到发射红外信号的功率的限制,红外信号通常比日光低,使得后者污染反射信号。反射的IR的振幅也根据物体表面的材料和颜色而变化。
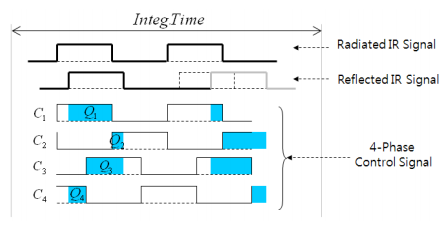
TOF深度图像的另一个关键问题是由摄像机或物体运动引起的运动模糊。与传统彩色摄像机相比,TOF数据的运动模糊表现出独特的特性。深度精度和帧速率都受到深度相机所需的积分时间的限制。较长的积分时间通常允许更高精度的深度测量。对于静态对象,因此,我们可能想要降低帧速率,以便从较长的积分时间获得更高的测量精度。另一方面,以固定帧速率捕获运动对象对积分时间施加限制。
在本章中,我们讨论了深度图像噪声和误差源,并对TOF和结构光系统进行了比较分析。首先,回顾TOF深度测量原理。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






