
资料下载


×
TI的飞行时间摄像头详细介绍
消耗积分:0 |
格式:rar |
大小:0.99 MB |
2019-02-22
分享资料个
3D飞行时间(TOF)技术通过使用低成本的CMOS像素阵列和有源调制光源提供3D成像,正在彻底改变机器视觉行业。结构紧凑,使用方便,加上高精度和帧速率,使TOF相机成为广泛应用的一个有吸引力的解决方案。在本文中,我们将介绍TOF操作的基础知识,并将TOF与其他二维/三维视觉技术进行比较。探讨了TOF传感技术在手势、三维扫描打印等方面的应用。最后,提供了帮助读者开始使用Texas Instruments的3D TOF解决方案的资源。
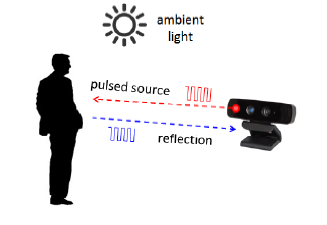
一个三维飞行时间(TOF)相机的工作原理是用调制光源照亮场景,观察反射光。测量照明和反射之间的相移,并将其转换为距离。图1说明了TOF的基本概念。通常情况下,照明来自固态激光器或LED,在近红外范围内工作(约850nm),肉眼看不见。设计用于响应相同光谱的成像传感器接收光并将光子能量转换为电流。注意,进入传感器的光有一个环境分量和一个反射分量。距离(深度)信息只嵌入在反射组件中。因此,高环境分量降低了信噪比(SNR)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





