
资料下载


什么是PID控制器?PID控制的基本原理及被控器举例的详细资料免费下载
青樓滿座丶只因人心寂
分享资料个
PID(比例,积分,微分)控制没有看起来那么复杂,阅读下面简单的实现步骤,效果立竿见影。
在工作中,我是三个号称伺服员(servo guys)中的一个,唯一一个用软件来实现控制系统中的环路控制。因此,我经常有机会为各种项目设计数字控制环路。我发现,虽然控制系统的问题需要大量专业知识,但是大多数控制系统问题能用简单的方法来解决,根本就不诉诸任何控制理论。这篇文章将告诉你不用大量的数学,无需学习任何控制理论,如何来实施和整定一个简单的控制系统。
PID 控制
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备和电子设备。采用微处理器的数字 PID 控制器已经出现,正如你即将看到,嵌入一个 PID 控制器到你的代码中是一个简单的任务。
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构成 PID 基本要素。每一项完成不同任务,对系统功能产生不同的影响。
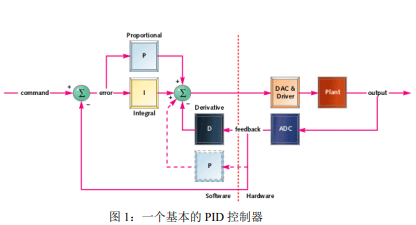
典型的 PID 系统中,输入命令值(system commad)和被控器(通常被称为 plant)反馈信号的组合作为 PID 控制器三项的输入,三项的输出相加起来形成 PID 系统的控制输出。
图 1 表示一个基本 PID 控制器的方框图,图中微分项的输入只有被控设备的反馈信号。命令信号(command signal)减去被控设备反馈信号产生误差(error)。这一误差信号送入比例项和积分项。三项产生的结果相加最后驱动被控设备。后面我会介绍这三项主要做了些什么。根据系统如何响应命令,图中用虚线增加了一个比例项位置(这可能是比例项最佳的放置位置)。
被控器举例我们需要举一些例子来增加读者对 PID 的印象,文中我会举三个例子来说明 PID 在不同应用中产生的效果。
电机驱动齿轮组
精密定位系统
恒温系统
每一个系统都有不同的特点,每一个需要不同的控制策略以获得最佳的性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





