
资料下载


CAN总线协议2.0版中文资料免费下载
wangqi14921
分享资料个
本文结合语音识别中运用较广的美尔频率倒谱系数(MFCC)和线形预测倒谱系数(LPCC)作为滚动轴承音频信号的特征参数,并使用具有强学习能力的神经网络方法进行故障诊断,最后依靠Dempster-Shafrg(D-S)证据理论进行分析得出可信度高的判定结果。实验结果表明,该方法在滚动轴承的音频信号故障诊断中有效可行。在积累足够量的样本数后,可望建立相应的专家库,实现轴承故障的快速智能诊断。
随着串行通讯进入更多应用领域,因此,在一些应用里,需要对通讯功能的报文识别位提出分配标准化的要求。原先的地址范围由11 个识别位定义,如果地址范围扩大,则这些应用就可以更好地由CAN 来实现。
因此引入了第二种报文格式(‘扩展格式’)的概念,其定义的地址范围更宽,由29 位定义。系统设计者将从考虑定义良好的结构命名方案中得到解放。有的用户不需要由扩展格式提供的识别符范围,可以继续沿用常规的11 位识别符范围(‘标准格式’),在这种情况下,可以采用市场上可用的CAN 仪器,或使用兼容这两种模式的新控制器类仪器。
为了区别标准格式和扩展格式,按CAN 1.2 规范定义,使用了CAN 报文格式的第一个保留位。因为CAN1.2 定义的信息格式相当于标准格式,因此仍然是有效的。此外,由于扩展格式已经定义,因此网络中会共存标准格式和扩展格式的报文。
这本CAN 规范技术规范由两部分组成:
• A 部分:CAN 的报文格式说明(按CAN1.2 规范定义)。
• B 部分:标准格式和扩展格式的说明。
为了兼容CAN2.0,要求CAN 的仪器应兼容A 部分或B 部分。
控制器局域网(CAN)为串行通讯协议,能有效地支持具有很高安全等级的分布实时控制。CAN 的应用范围很广,从高速的网络到低价位的多路接线都可以使用CAN。在汽车电子行业里,使用CAN 连接发动机控制单元、传感器、防刹车系统、等等,其传输速度可达1 Mbit/s。同时,可以将CAN 安装在卡车本体的电子控制系统里,诸如车灯组、电气车窗等等,用以代替接线配线装置。
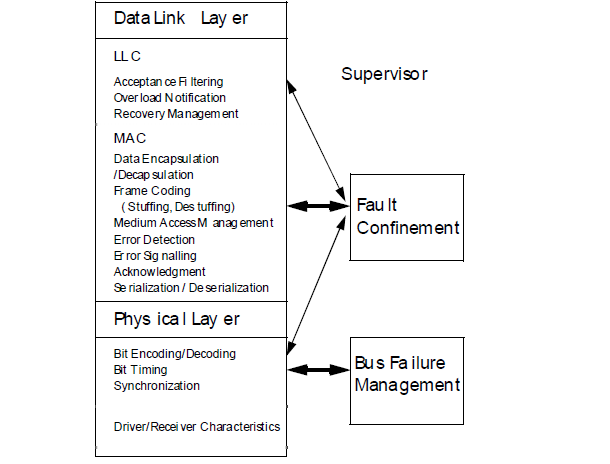
这本技术规范的目的是为了在任何两个CAN 仪器之间建立兼容性。可是,兼容性有不同的方面,比如电气特性和数据转换的解释。为了达到设计透明度以及实现柔韧性,CAN 被细分为以下不同的层次:
• CAN 对象层(the object layer)
• CAN 传输层(the transfer layer)
• 物理层(the phyical layer)
对象层和传输层包括所有由ISO/OSI 模型定义的数据链路层的服务和功能。对象层的作用范围包括:
查找被发送的报文。
确定由实际要使用的传输层接收哪一个报文。
为应用层相关硬件提供接口。
在这里,定义对象处理较为灵活。传输层的作用主要是传送规则,也就是控制帧结构、执行仲裁、错误检测、出错标定、故障界定。总线上什么时候开始发送新报文及什么时候开始接收报文,均在传输层里确定。位定时的一些普通功能也可以看作是传输层的一部分。理所当然,传输层的修改是受到限制的。物理层的作用是在不同节点之间根据所有的电气属性进行位信息的实际传输。当然,同一网络内,物理层对于所有的节点必须是相同的。尽管如此,在选择物理层方面还是很自由的。这本技术规范的目的是定义传输层,并定义CAN 协议于周围各层当中所发挥的作用(所具有的意义)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




