
资料下载


如何使用粒子Mean Shift迁移进行红外人体目标跟踪算法概述
分享资料个
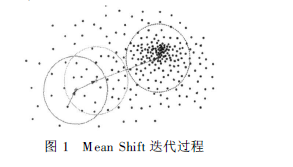
提出了一种基于粒子Mean Shift 迁移过程的红外人体跟踪方法。 算法通过采样粒子迁移和聚类动态建立目标的状态模型和量测模型。 在被跟踪区域随机布撒粒子, 以各粒子对应像素的亮度作为特征值进行Mean Shift收敛性分析, 使用收敛后的粒子集表达目标的当前状态; 以状态粒子的坐标位置为特征值对其进行Mean Shift 聚类, 作为对目标的量测。 连续跟踪时, 下一帧的采样粒子基于上一帧的量测结果产生。 与传统的基于序贯重要性采样的粒子滤波方法相比, 算法不需要目标的相似性测度计算, 仅用少数粒子即可实现对目标的可靠跟踪.
红外图像中人体目标的跟踪困难主要来自两个方面: (1) 人体目标的自身特征。 由于人体是非刚体目标, 姿态多样, 大小不一, 而且运动状态复杂多变,具有高度的随意性, 没有固定的运动规律, 无法建立完善的运动模型表达形式;
(2) 红外图像是灰度图像, 没有色彩信息, 纹理细节很少, 使得目标跟踪可用的特征值较少。 传统的跟踪方法如光流法是基于刚体运动目标, 对于非刚体目标的跟踪受到限制,用于人体目标跟踪时必须与其它特征相结合才能完成 ; 卡尔曼滤波及其扩展形式等是基于线性/ 高斯动态系统, 需要对目标的运动特征进行假设, 建立目标运动模型,如CP、CA、CV 等模型, 使其在应用于人体目标跟踪时受到一些限制。 目前, 用于人体目标跟踪的比较可行的算法是采用贝叶斯滤波跟踪的形式, 粒子滤波作为贝叶斯滤波的最优近似, 适用于任意非线性非Gauss 的随机系统, 适合于人体目标的跟踪。 粒子滤波是基于仿真的统计滤波方法, 需要采用大量的随机样本粒子来估计, 使得运算量很大, 此外还非常依赖于相似函数的选择, 并面临粒子退化和粒子枯竭的问题。 近年来Mean Shif t 算法作为一种有效的统计迭代算法, 在满足一定条件下, 可快速收敛到最近的一个概率密度函数的稳态点而不需要任何先验知识, 实现非参数概率密度的估计, 在人体等非刚体目标跟踪中得到了很好的应用 。 但由于Mean Shif t 跟踪方案需要使用目标的色彩空间分布作为特征值, 使用跟踪区域的颜色直方图的Bhat tachary ya 系数进行相似性分析,对于红外人体目标来说, 丢失了色彩信息, 而且目标间的灰度特征都很接近, 很难通过颜色直方图的Bhattacharyy a 系数进行匹配, 传统的基于颜色的Mean Shif t 算法不能适用于此类跟踪任务.
本文基于粒子滤波的思想, 结合Mean Shif t 算法非参数概率密度估计的优点, 使用Mean Shift 方法对粒子进行收敛性分析, 使用达到稳定态的传播粒子对目标的状态进行动态建模, 由此, 在不需要知道目标模型先验知识的基础上, 不依赖于相似函数,与粒子滤波算法相比, 克服了粒子退化及粒子耗尽的问题, 仅用少数的粒子即可实现对人体目标进行可靠跟踪, 降低了运算量.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



