
资料下载


×
如何结合粒子群寻优与遗传重采样实现RBPF算法
消耗积分:0 |
格式:rar |
大小:1.28 MB |
2020-09-30
分享资料个
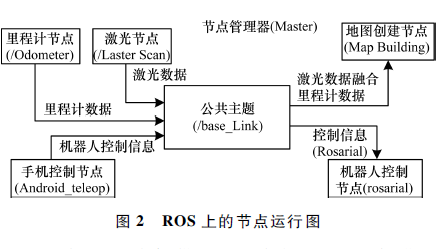
针对RaoBlackwellized粒子滤波器(RBPF)重采样过程存在粒子衰竭、提议分布精确度不高的问题,提出一种改进的RBPF算法。为提高RBPF算法提议分布精确性,在改进的算法中将机器人里程计信息和激光传感器采集的距离信息进行融合,在算法中引入粒子群寻优策略,通过粒子间能效吸引力来调整采样粒子集,同时对重采样中权值较小的粒子进行遗传变异操作,缓解粒子枯竭现象,提高机器人位姿估计一致性,并维持粒子集的多样性。在基于机器人操作系统和配有URG激光传感器的Pioneer3DX机器人平台上对改进RBPF算法进行可靠性验证。实验结果表明,改进算法在兼顾粒子集多样性的同时能显著提高机器人位姿估计精确性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



