
资料下载


如何使用STM32单片机设计四旋翼自主飞行器探测跟踪系统资料概述
tantantant
分享资料个
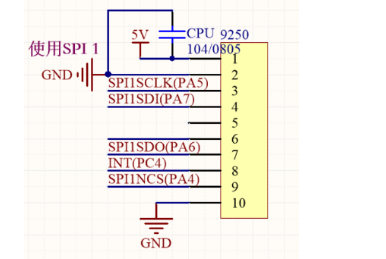
本设计采用STM32主控制器,并用瑞萨芯片进行数据处理,该四翼飞行器主要由飞行控制模块,摄像功能模块,电源模块,电机电调,惯性导航传感器,激光等六部分组成;陀螺仪采用MPU9250模块。飞行器的动力来源为DJI2312无刷电机,通过控制PWM的增减量实现电机的调速。采用光流实现对飞行器飞行高度的准确控制,采用摄像头使飞行器在A区降落和识别寻找小车。通过对飞行器飞行参数采集和处理,运用相应的控制算法,实现飞行器的自主飞行、悬停、降落、识别,追踪等功能。
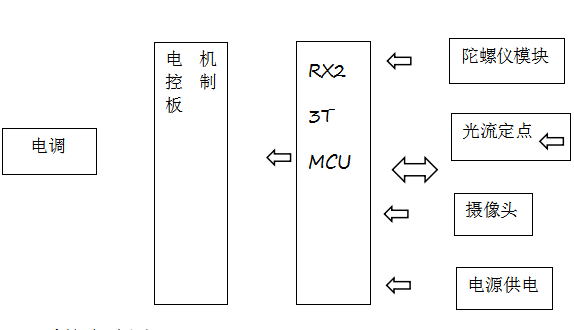
飞行控制板采用STM32作为主控芯片,主频为8M,有浮点型计算单元,与外部通信方式有两路串口和SPI,其中SPI用来采集惯性导航传感器的数据,串口用来和光流模块、小车数传、电机控制板通信。
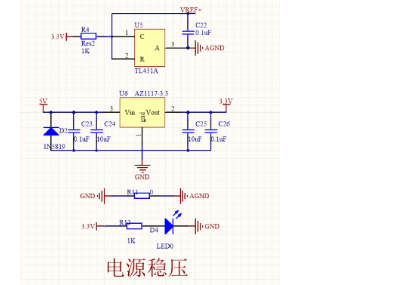
方案一:采用线性元器件AZ1117配合TL431A构成稳压电路,该稳压模块可调节,效率高,稳定且综合性能好,为飞行器提供稳定的电源输入。
方案二:LM2596,功率小,效率高,具有过热保护和限流保护功能,但输出纹波大。
根据测试,选择方案一。
方案一:摄像头、光流模块,通过光流模块对水平面移动的检测得出当前速度,积分得到相对位移,从而达到室内定点的效果,光流上自带的TOF激光测距模块可以提供高度数据。并通过openMV视觉模块来获得目标点和机身的相对位移,达到跟随的效果。
方案二:室内超声波、摄像头,使用超声波定位时将飞行器的YAW轴控制量锁死,然后直接得到飞行器和场地的水平距离,从而达到定点效果,摄像头作用同上。
经过测试,超声波定点极易受到干扰,光流模块鲁棒性较强,数据更新较快,选择方案一。
该四翼飞行器主要由飞行控制模块,摄像功能模块,电源模块,电机电调,惯性导航传感器,激光等六部分组成,飞机外形是十字交叉型骨架,桨叶驱动电机安装在展臂末端,并用DJI420LITE电调控制电机转速,其余模块均安装在飞行器骨架中心。飞行控制板采用STM32为主控制芯片,外接MPU9250所构成。飞机工作中飞控板采集的数据由瑞萨芯片处理后输出串口命令到电机控制板,发送给电机控制器做出飞行姿态的调整;电源模块为整个系统提供持续稳定的电流,保证飞行器的正常工作。摄像头和光流模块,可以完成定点定高,识别小车等比赛要求。
四旋翼飞行器通过四个电机的转速差来控制,如图所示,旋翼1和3逆时针旋转,旋翼2和旋翼4顺时针旋转,通过改变旋翼转速实现升力变化。反向旋转的两组旋翼,可以平衡正向旋转的旋翼对机身的反扭矩,保证四个旋翼转速一致,机身不发生转动。
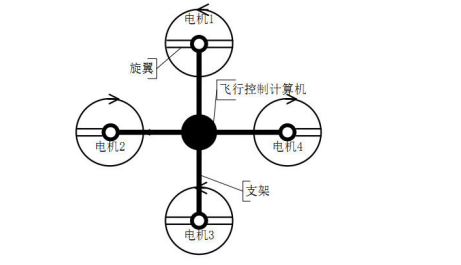
电机1和4的转动速度减小(增大),同时电机2和电机3的转动速度增大(减小),产生向前(后)方向上的运动。同理,电机1和电机2的转动速度减小(增大),飞行器产生向右(左)方向的运动。四个电机同时减小(增大)转速,产生向下(上)的运动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




