
资料下载


如何使用信息融合进行角度传感器的设计及实现
影心云溪
分享资料个
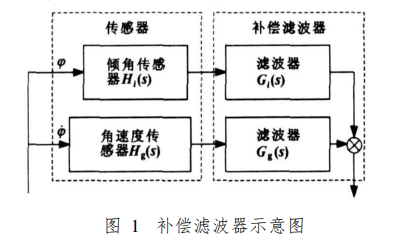
为了准确测量非稳定平台系统偏离平衡位置的角度值, 在对数据融合技术进行综合研究的基础上, 提出了基于多传感器数据融合的补偿滤波器融合方案。针对倾角传感器的滞后性和角速度传感器的零点漂移, 进行了一系列的试验, 校正了补偿滤波器的参数。对于补偿滤波器的性能进行了试验验证, 试验结果证明, 补偿滤波器可以有效补偿倾角传感器的滞后和角速度传感器的漂移。
非稳定平台像传统的倒立摆一样, 本身是一个自然不稳定体, 必须施加十分强有力的控制手段才能使之稳定。由于它的行为与火箭飞行以及两足机器人行走有很大的相似性, 因而对其研究具有重大的理论和实践意义 。对于非稳定平台的平衡控制, 首先要解决的是系统偏离平衡位置角度值的准确测量, 也就是角度实时信息的正确估计。
在平台的角度测量系统中, 通常采用一个角速度传感器和一个倾角传感器来进行信息采集。角速度传感器在静止不运动时存在着静态均值, 并且随着时间变化产生零点漂移。为了得到精确的测量角速度, 每次测量中必须消除它的静态均值。而倾角由于自身的内在原因, 输出的角度信号总会有一定的滞后性。角速度传感器的零点漂移及倾角传感器滞后性都表明: 选用任意一种传感器都不能提供充分可靠的角度实时信息。传统的解决方法就是采用价格昂贵的高精度传感器, 随着多传感器融合技术的发展, 寻找一种低成本的解决办法已经成为可能。
作者提出了一种基于多传感器数据融合的低成本、宽频带的平台姿态检测传感器, 介绍了该方法的结构组成、工作原理、制作方法和性能测试。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



