
资料下载


智能寻迹避障小车避障系统设计的资料说明
寂杰风驰
分享资料个
1.任务
任务一:产生智能寻迹避障小车避障控制程序;
任务二:产生智能寻迹避障小车寻线、避障、报警等综合功能控制程序;
2.要求
(1)能控制智能寻迹避障小车避开行进路上障碍物的功能; (2)小车行进过程中遇到障碍物应具有报警提示功能;
3.1 项目描述
该项目的主要内容是:在智能寻迹避障小车寻迹系统上扩展避障、报警等电路模块,然后运用C语言对这些功能模块电路进行编程,使智能寻迹避障小车在行进过程中,能对正前方的障碍物自动完成避障功能,并且遇障碍能够报警,当退出障碍时报警声也消失。通过该项目的学习与实践,可以让读者获得如下知识和技能:1掌握红外线收、发对管的避障的原理与控制方法;2 掌握蜂鸣器报警的控制方法; 3掌握比较芯片L393的工作原理与控制方法; 4能够编写出智能寻迹避障小车寻线、避障、报警等综合功能的控制函数。
3.1.1 关于比较芯片
LM393
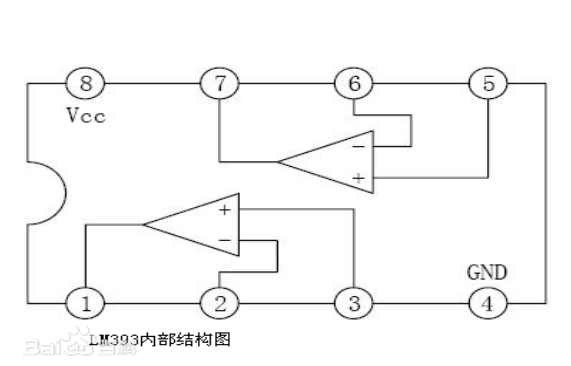
本设计中的比较芯片LM393是一个电压比较器,它将一个模拟量电压信号和一个参考固定电压相比较,在二者幅度相等的附近,输出电压将产生跃变,相应输出高电平或低电平。如图3.1所示为LM393集成芯片封装图;其中,2脚为参考固定电压输入脚,3脚为模拟量电压信号输入脚。工作过程大致如下:
当3脚(“+”)输入端电压高于2脚(”-”)输入端电压时,电压比较器的1脚输出为高电平;
当3脚(“+”)输入端电压低于2脚(”-”)输入端电压时,电压比较器的1脚输出为低电平;
图3.1比较芯片L393封装示意图
报警器的种类很多,比如:扬声器、蜂鸣器等,本设计中选用电磁式蜂鸣器作为报警器。电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场。振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。
智能寻迹避障小车的避障系统由单片机最小型系统、电机控制模块、巡线电路模块、红外避障电路模块、报警电路模块、传感器指示电路模块等构成。系统框图如图3.3所示。其中电机控制模块与巡线电路模块共同引导小车完成路线行走功能;红外避障电路模块主要用于检测、发现小车行进路径上的障碍物,具体的避障则由电机控制与巡线模块配合完成;报警模块主要用于小车遇到障碍物时发出声音报警,起到提示作用。
智能寻迹避障小车避障电路原理图如图3.4所示:其中避障电路由单片机、比较芯片L393、红外 发射对管等元器件构成。电路工作过程如下: 首先,比较芯片的2脚为比较基准电压输入, 该引脚通过电源串联分压,取得一个大约2.5V基准电压作为比较电压。比较芯片的3脚为比 较电压的输入端,该电压取之反馈回来的红外信号。当小车前进过程中,前方无障碍,则红外接收管的阻值会很大,从而输出一个高电平(约5V)给比较芯片的3脚,这样经过比较 芯片的比较,在比较芯片的2脚输出一个高电平给单片机P3.7引脚。单片机根据接收到的电 平就可以判别前方有无障碍。当前方有障碍时 V2的阻值会很小,输出低电平给比较芯片的3脚,比较芯片从而输出低电平给单片机P3.7。 为了保证避障的准确性,在安装红外收、发对管时,应跟小车保持平行,这样便可以准确对小车正前方的障碍物及时发现。
报警电路:由晶体三极管V1(S8550)、电阻 R2以及蜂鸣器SB1组成。当电路平时不需要发 声报警时,单片机的P0.6端口输出一个高电平,使晶体三极管截止,蜂鸣器因此不发声。当需要发声报警时,便编程控制从P0.6输出低电平或一定频率的方波或矩形波,使V1在导通与截止两种状态切换,从而蜂鸣器发出不同的声音。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





