
资料下载


CAN总线的技术及应用教程免费下载
分享资料个
CAN ( Controller Area Network ) 即控制器局域网络。由于其高性能、高可靠性、及独特的设计,CAN越来越受到人们的重视。国外已有许多大公司的产品采用了这一项技术
CAN最初是由德国的BOSCH公司为汽车监测、控制系统而设计的。现代汽车越来越多地采用电子装置控制,如发动机的定时、注油控制,加速、刹车控制(ASC)及复杂的抗锁定刹车系统(ABS)等。由于这些控制需检测及交换大量数据,采用硬接信号线的方式不但烦琐、昂贵,而且难以解决问题,采用CAN总线上述问题便得到很好地解决。
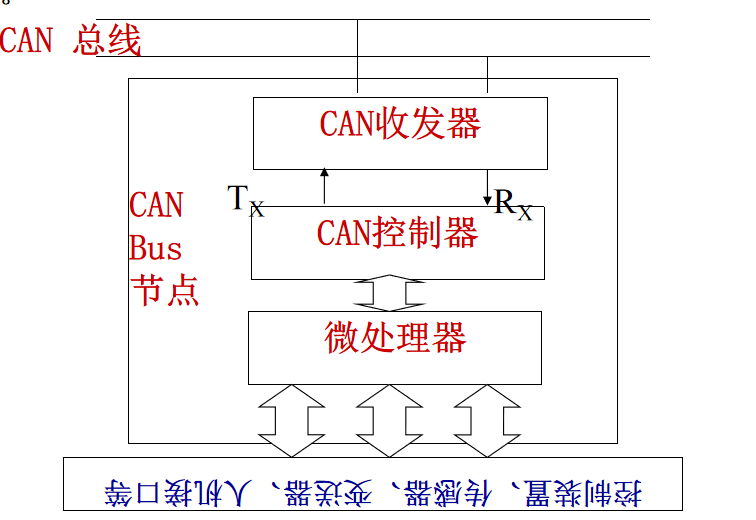
CAN总线是一种串行数据通信协议,其通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN总线特点如下:
(1)可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
(2)网络上的节点(信息)可分成不同的优先级,可以满足不同的实时要求。
(3)采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据。
(4)可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
(5)直接通信距离最远可达10km(速率5Kbps以下)。
(6)通信速率最高可达1MB/s(此时距离最长40m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其他检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。
(11) 节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
CAN的起源
现代社会对汽车的要求不断提高,这些要求包括:极高的主动安全性和被动安全性;乘坐的舒适性;驾驶与使用的便捷和人性化;尤其是低排放和低油耗的要求等。
在汽车设计中运用微处理器及其电控技术是满足这些要求的最好方法,而且已经得到了广泛的运用。目前这些系统有:ABS(防抱系统)、EBD(制动力分配系统)、EMS(发动机管理系统)、多功能数字化仪表、主动悬架、导航系统、电子防盗系统、自动空调和自动CD 机等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





