
一文讲透自动驾驶中的“点云”
蔚来自研激光雷达主控芯片NX6031V10面世 一年可收回研发成本
北京大学等提出HandTrackNet:点云序列中手物交互的位姿追踪与重建
基于点云的视觉引导系统
十大点云数据处理技术和点云应用汇总
点云分割相较图像分割的优势是啥?
点云配准任务中的点特征与一般点特征的区别在哪里?
三维点云配准的相关知识学习技巧
解决由激光雷达线数差异导致的三维目标检测域适应问题
如何将灰度图转为3D点云

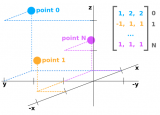
点云的概念以及与三维图像的关系

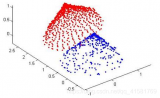
求一种采用空间投影的点云分割方法
创建点云数据的Birdseye视图
基于层级图网络的图卷积,用点云完成3D目标检测
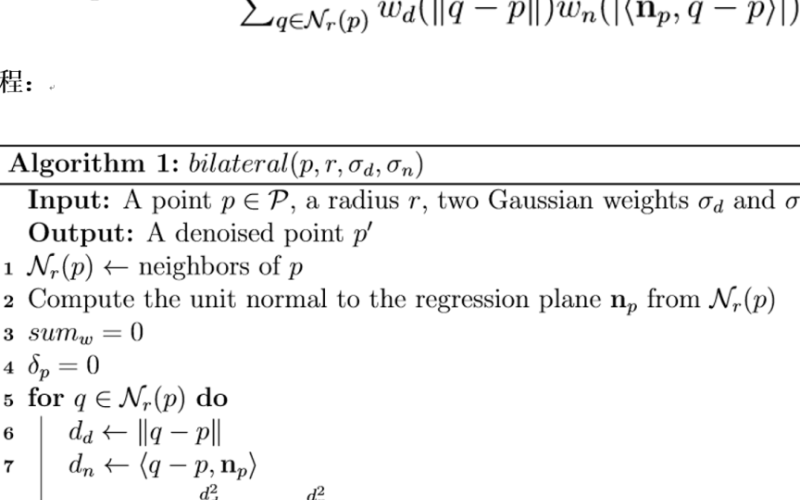
LabVIEW:适合点云平滑的双边滤波器

雪湖科技的激光点云AI计算模块三个技术创新特点

基于点云的3D障碍物检测
点云匹配与ICP算法基本思想
激光雷达点云数据
点云综述以及点云的挑战与展望

 下载APP
下载APP
 搜索内容
搜索内容
