

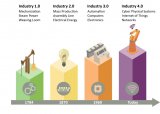
移动机器人的发展现状及趋势 HMS产品在移动机器人的应用
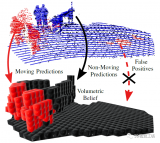
雷达点云动态目标分割算法研究分析
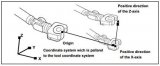
机器人六点法标定的步骤是什么
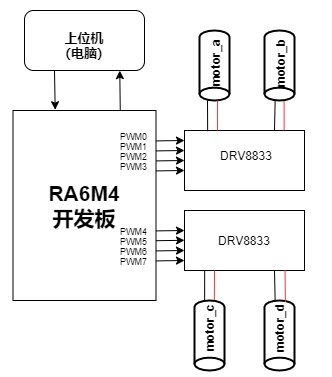
基于RT-Thread+RA6M4的麦轮结构底盘运动控制系统设计

自动驾驶中基于网格的交通场景感知介绍
角度传感器的工作原理 角度传感器原理及应用

避障常用哪些传感器?机器人视觉避障原来是这样的
道路环境感知对移动机器人导航的重要性
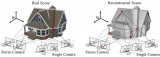
使用视觉特征辅助长走廊中的移动机器人定位技术解析
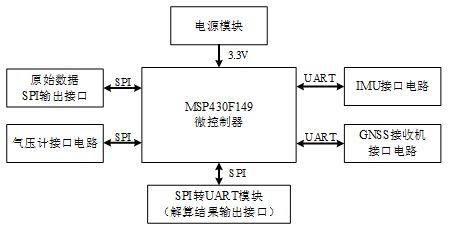
基于MCU的室外移动机器人组合导航定位系统
科力光电-KLMs安全型激光雷达产品优势
面向移动机器人的无线充电技术实现工业4.0

AGV机器人:基于视觉避障的理论基础

室外AGV/AMR技术发展现状及趋势
2023年工业AGV/AMR的发展趋势

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术

瞄准AGV/AMR领域-维感科技发布高性价比RGB-D ToF相机DS86/87
机器人定位是如何实现的?
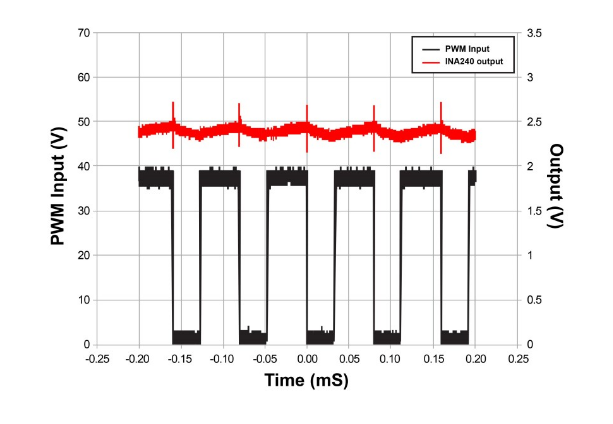
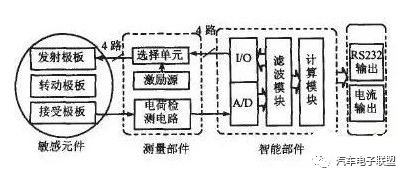
为什么电流检测是协作式移动机器人的必备条件
Wheel-SLAM:低成本轮式IMU的SLAM系统

 下载APP
下载APP
 搜索内容
搜索内容
