
资料下载


使用ADAMS和MATLAB实现Stewart并联机器人模糊自适应PID控制器的仿真
分享资料个
为降低模型建立的难度,本文基于ADAMS建立了六自由度Stewart并联机构模型,并在模糊PID控制理论的基础上建立了模糊PID控制器的Simulink控制方框图,运用联合仿真技术对Stewart并联机器人位置的模糊PID控制性能进行仿真。通过研究得出,从最低升到最高处的阶跃响应的峰值响应时间约为0.25 s,稳态误差小于0.01 m,其控制器比例系数在衰减后上升,最后稳定在2.68附近,积分参数起时为0,在0.05 s时迅速上升,最后稳定在0.08附近。
由上、下两个平台和六个可伸缩的支腿通过运动副连接而成的具有六自由度运动能力且能够模拟空间各种位姿运动的Stewart并联机构最初被设计用作飞行员的飞行模拟器。由于这种机构与传统的串联机构相比具有精度高、刚度大、结构稳定、承载能力强、运动惯量小、动态特性好、反解易获得等优点,其逐渐在航空航天、天文观测、汽车工业、隔振平台、高档数控机床以及起重运载等领域中得到广泛的应用。
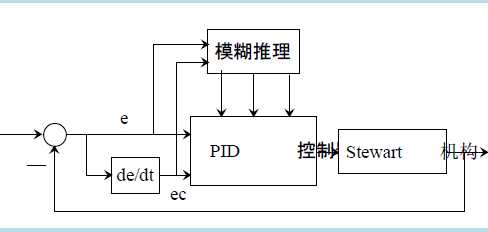
由于在具体应用中涉及机械、电机(或液压)驱动、控制、传感等多学科再加上其运动学正解的多解性,使得Stewart并联机构在仿真建模和实际应用中并不容易。特别是在对Stewart平台结构设计和控制器设计时,需要对平台相关的运动学、动力学参数进行计算,以此来为结构设计提供理论依据。而在运动学、动力学参数计算过程中存在大量的数值计算和矩阵计算,形式繁琐且容易出错,不利于工程实际应用。为了解决这个问题,本文采用ADAMS建立Stewart并联机构的模型,基于MATLAB建立模糊PID控制器模型,通过联合仿真对Stewart并联机器人的控制参数进行整定,对其性能进行仿真设计,此种方法由于基于商用软件,因此具有简单、不涉及复杂的理论和公式的优点
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




