
资料下载


×
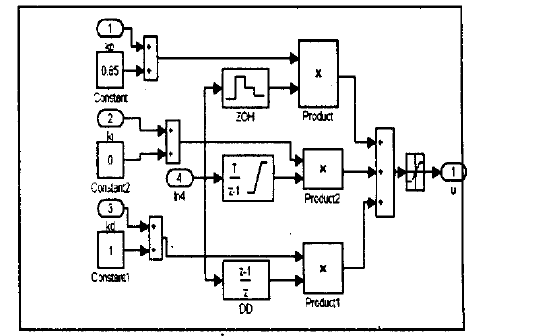
使用SIMULINK设计Fuzzy PID控制器的资料说明
消耗积分:0 |
格式:rar |
大小:0.17 MB |
2019-10-30
分享资料个
设计了一种Fuzzy—PID控制算法,利用MATIAB的SIMULINK进行仿真研究,结果表明,该控制器具有较强的抗干扰能力和鲁棒性,有较好的动、静态控制精度.
传统PID线性控制器根据被控对象的不同,适当地调整PID参数,可以获得比较满意的控制效果.然而,传统PID控制器的线性特性只有在工作点附近才能获得较理想的效果,当偏离工作点较远时,由于控制对象的非线性,系统的性能会变差,甚至不稳定.而模糊控制方法无须建立被控对象的数学模型,在偏离工作点的区域可明显改善控制的动态性能,同时对噪声也有较强的抑制能力,鲁棒性较好n].但模糊控制器本质上属于非线性控制方法,消除系统误差的性能较差,难以达到较高控制精度.单纯采用PID控制和Fuzzy控制都不会取得较好的控制效果,而采用Fuzzy—PID控制方式控制是一种较好的控制方法.它能发挥Fuzzy控制鲁棒性强、动态响应好、上升时间快、超调小的特点,同时又具有PID控制器动态跟踪品质和稳态精度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





