
资料下载


×
视觉导航的技术研究资料说明
消耗积分:0 |
格式:rar |
大小:0.33 MB |
2019-11-06
分享资料个
视觉导航是采用CCD 摄像头拍摄路面图像,运用机器视觉等相关技术识别路径,实现自动导航的一种新兴导航方法。
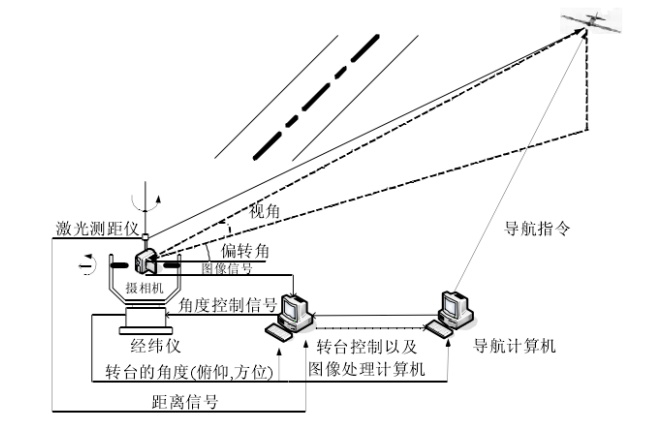
本文所要解决的主要问题是如何通过图像跟踪的方法来获取飞机的坐标(x, y, z),因此对于导航中所要解决的姿态角的获取问题将不做讨论。由于采用图像跟踪技术实现的导航和眼睛观察目标然后定位的原理相似,因此也称该导航方法为视觉导航。
本文的视觉导航系统,考虑到机载图像采集装置的可维护性及成本等因素,故把图像传感器安装地面跟踪系统上,从而实现地面导航。
引自:《无人机自动着陆过程中的视觉导航技术研究》
资料一:
下面对由转角得到具体的空间位置展开讨论,即视觉导航原理。
2.4.2 地面坐标系的建立
要获取飞机在固定坐标系中的坐标,首先要建立这个坐标系,其目的是为了获取飞机的绝对位置,为了配合第四章的摄像机坐标系变换,本文采用的坐标是以无人机降落的跑道为z轴,飞机跑道上某点为原点建立坐标系,以下称该坐标系为地面坐标系,如图2.7所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



