
资料下载


×
使用机器视觉进行工业机器人分拣技术的研究资料分析
消耗积分:0 |
格式:rar |
大小:0.57 MB |
2019-08-27
分享资料个
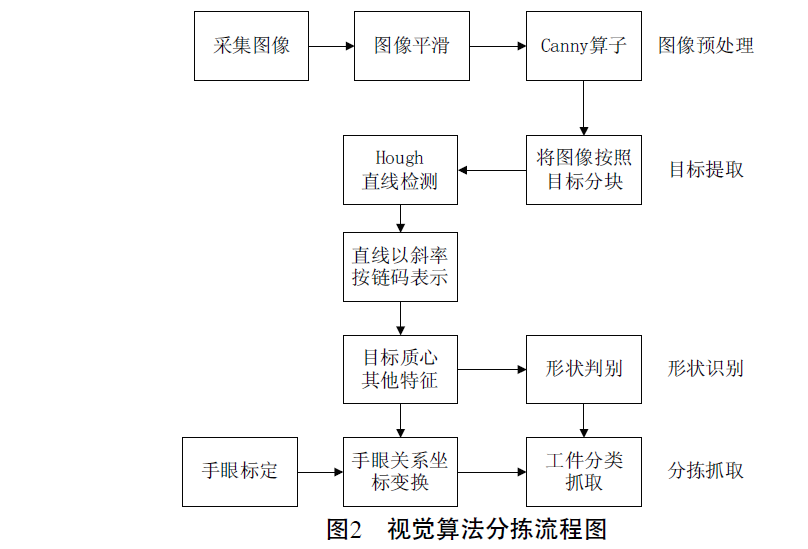
将视觉系统应用到工业机器人当中去,使得机器人具有人眼的功能是当今机器人研究的重点。本文针对以往工业生产线分拣工件时存在的问题,从视觉的角度研究了相关技术难点。本文完成了基于机器视觉的工业机器人分拣系统平台的搭建,首先通过摄像机对传送带上进入工作区的工件进行图像采集,然后对图像预处理分析,接着用不变矩对工件进行快速识别,之后用Hough-链码识别算法对工件进行精细匹配,最后通过中心定位算法计算出工件的位置,引导机器人对工件进行分拣抓取。同时,本文还提出了多目标分块处理算法和Hough变换与链码相结合的Hough-链码识别算法。实验结果表明,该分拣系统可以有效解决规则几何工件的分类的问题,达到分拣的目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 Calm_374
2020-08-01
0 回复 举报挺有意思的,原理思路很清晰 收起回复
Calm_374
2020-08-01
0 回复 举报挺有意思的,原理思路很清晰 收起回复
- 相关下载
- 相关文章





