
资料下载


×
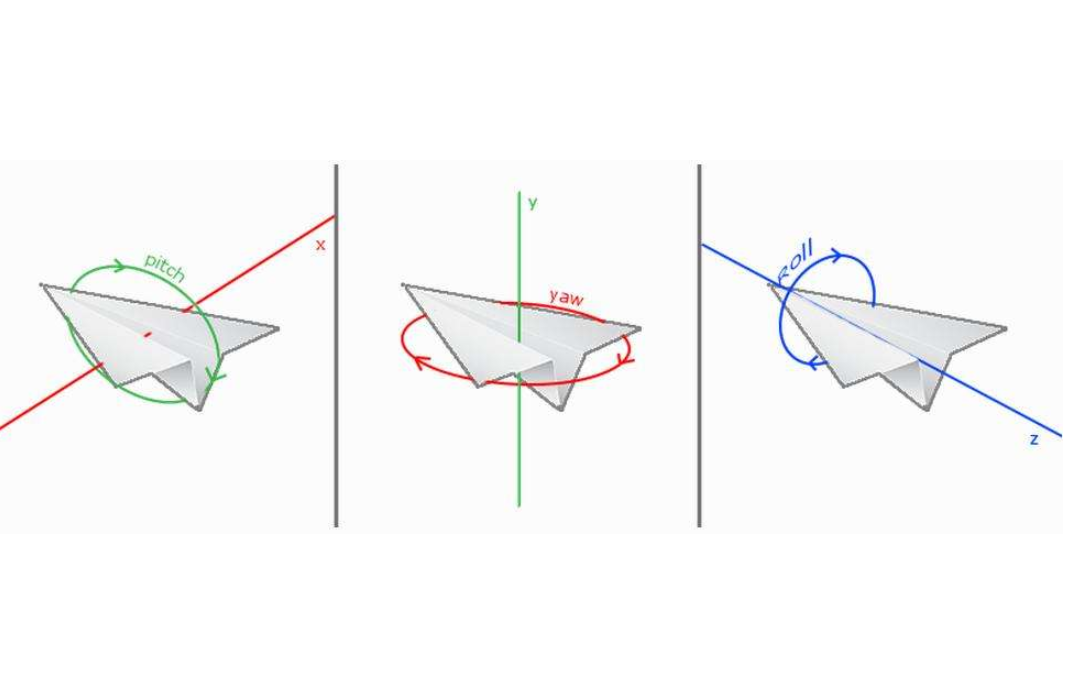
如何将四元数转化为欧拉角
消耗积分:0 |
格式:rar |
大小:0.01 MB |
2019-12-05
分享资料个
四元数转化为欧拉角:
1. 初始姿态的四元数(w,x,y,z)=(1,0,0,0) 命名为A(四元数初值)
2. 读取3轴陀螺仪当前时刻的Yaw,Pitch,Roll角速度,乘以上次计算以来的 间隔时间,得到上一时刻以来(Yaw,Pitch,Roll)的变化量,命名为欧拉角b(角 速度对时间积分的角度变化量得到欧拉角)
3. b是Tait-Bryan angle定义的欧拉角,将其转为四元数B(欧拉角-》四元 数)
4. A=A×B,做四元数乘法,即可得到当前姿态对应的新的四元数A(更新 四元数)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




