
资料下载


×
设计一个巡线机器人的竞赛试题免费下载
消耗积分:0 |
格式:rar |
大小:0.45 MB |
2019-12-19
分享资料个
一、任务
设计
一基于 四旋翼 飞行器的 巡 线 机器人,能够巡检电力线路 及杆塔 状态(见图 1)),发现 异常 时 拍摄 存储,任务结束 传送到 地面 显示 装置上 显示 。 巡线机器人中心位置 需 安装垂直向下的激光笔,巡线期间激光笔始终工作 以标识航迹。
二、要求
1.基本 要求
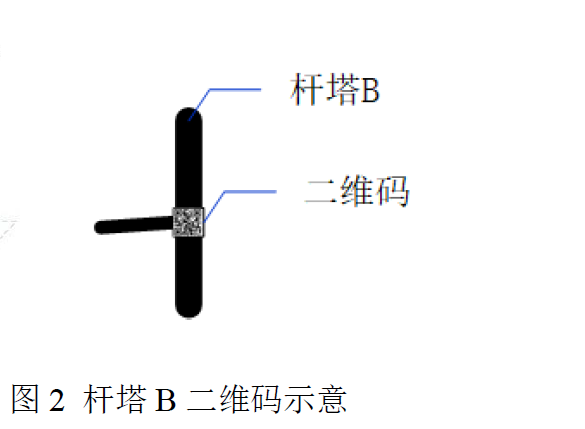
(1) 巡线机器人从距 A杆塔 1米范围内的起飞点起飞, 以 1米定高 绕杆 巡检, 巡检流程 为 :起飞 杆塔 A 电力线缆 绕 杆塔 B 电力线缆杆塔 A,然后稳定降落 巡检期间, 巡线机器人 激光笔轨迹应落在地面虚线框内。
(2) 从起飞到降落, 巡线 完成 时间不得大于 150秒, 巡线 时间越 短 越好 。
(3) 发现线缆上 异物 (黄色 凸起物 巡线机器人 须在 与异物距离不超过30cm的范围内 用声 或 光提示 。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





