
资料下载


如何实现足球机器人控制系统的研究与设计
browneeyy
分享资料个
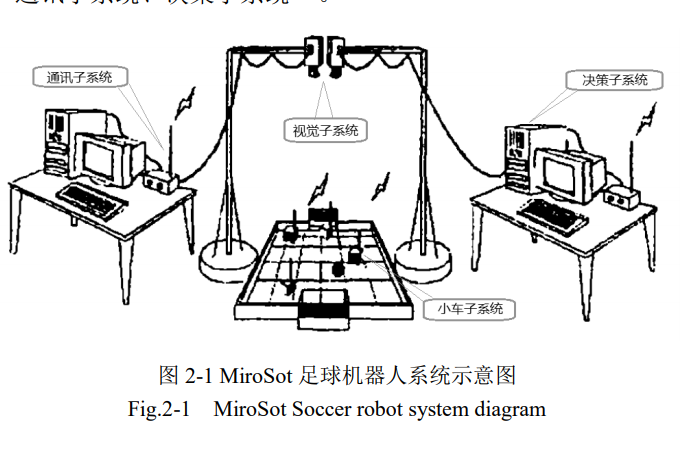
足球机器人系统融合了机器人学、传感器信息融合技术、机器视觉、智能控制、人工智能、机电一体化等关键技术,为相关领域的前沿科学理论研究提供了一个很好的实验与测试平台,受到各国的科学研究人员和工程技术人员的青睐,是当前机器人研究的的一个热点问题。控制系统是整个足球机器人系统的核心,它既需要具有较强的信息获取与处理分析能力,同时也必须具有较强的逻辑推理和决策能力。本文以 MiroSot(3:3)的足球机器人比赛为背景,对其控制系统的几个关键技术进行了深入研究,设计了相关的信息处理及控制算法,并采用 VC 编写完成了控制系统软件,实现了足球机器人系统的控制。文章主要完成了如下:首先,对足球机器人视觉处理系统进行了深入分析和研究,针对环境光照变化容易影响识别效果的问题,提出了一种基于动态阈值和背景差分的图像信号分析方法。文章详细地介绍了分析算法,并在此基础上完成了整个足球机器人视觉处理子系统设计。其次,对足球机器人决策子系统进行了深入分析和研究。通过在传统三层模型决策子系统的基础上增加一个策略知识库,提高了机器人动作的连贯性;通过对传统人工势场法进行改进,提出了一种改进的路径规划算法。文章在介绍足球机器人系统及其环境建模的基础上,详细阐述了基本动作层、运动规划层、协调层以及策略知识库的设计方法。第三,以本校创新基地的 MiroSot(3:3)足球机器人系统作为硬件平台,采用 VC 编写了该系统的控制软件,实现了 MiroSot(3:3)系统的控制,验证了算法有效性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






