
资料下载


足球机器人制作
蔡鼎瑾
分享资料个
描述
介绍
这是一个机器人制作教程。我们称之为足球机器人。在这个项目中,我们将分享如何制作一个能够与另一个足球机器人一起踢足球的机器人。我们的机器人将通过蓝牙通信使用智能手机进行控制。
什么是足球机器人?
简单地说,足球机器人是一种可以玩足球的机器人。这种类型的机器人基本上设计成可以远程和自主地踢足球。它具有一些独特的功能,例如可以非常轻松地处理冲击效果。这个机器人也是可以移动的非常快。
所需的硬件和工具
Required Hardware
01.阿杜诺兆
02. L298N电机驱动器
03. HC-05蓝牙模块
04. 直流电机 (4)
05. 迷你面包板
06. 锂电池(1000mAh)
07. 跳线(公对公)
08. 白色薄胶合板
09. 轮子 (4)
10. L型延伸
11. 螺钉、螺母和螺栓
Required Too
1. 螺丝刀组
2. 防切刀
3.钻孔机
4.带胶棒的胶枪
5. 用铅烙铁
6.数字万用表
电路分析
这个项目的电路设计非常简单。但是你在连接电线时总是需要提醒。因为如果您不匹配任何连接,您的机器人将被烧毁。
Connections between Arduino and Motor Driver
1. 数字引脚 8 到电机驱动器 IN1 引脚
2. 数字引脚 9 到电机驱动器 IN2 引脚
3. 数字引脚 11 到电机驱动器 IN3 引脚
4. 数字引脚 10 到电机驱动器 IN4 引脚
5. Arduino VIN 引脚到电机驱动器 +5V 引脚
6. Arduino GND 引脚到电机驱动器 GND 引脚
注意:这里我们从电机驱动器给 Arduino 供电(+5V)。该电机驱动器能够为任何其他组件提供 +5V。
Connections between Motors and Motor Driver
我们使用了电机驱动器的一个端口和 2 个直流电机。因为我们选择的电机驱动器不能一次控制4个电机。因此,我们使用了可以控制 4 个电机的 2 个端口。您可以连接电机作为电路图部分。
注意:上传代码后,有时会在这一步遇到问题。问题是电机无法正常旋转。就像当您要向前移动四个电机时,它可能会向后旋转。然后您需要修改代码,例如将正向代码替换为反向,反之亦然。或者您可以更换电机连接。它也适用于左右旋转。
Connections between Bluetooth Module to Arduino
1. 蓝牙模块 VCC 转 Arduino +5V 引脚
2. 蓝牙模块 GND Pin 到 Arduino GND Pin
3. 蓝牙模块 RX 引脚到 Arduino TX 引脚
4. 蓝牙模块 TX 引脚到 Arduino RX 引脚
Connections between Lipo Battery to Motor Driver
1. 锂电池正极引脚到电机驱动器+12V引脚
2. 锂电池负极引脚到电机驱动器 GND 引脚
注意:我们使用 11.1V 锂电池。在电路图中,它显示我们使用 3.7V 电池。这是不正确的。此项目您必须需要高达 7V 的电池。
机器人建造过程
Step-1
首先,我们在论文中设计我们的机器人。它是必须要做的事情。
Step-2
然后我们选择它的体型和结构。我们使用薄胶合板制作机器人的身体。
这是我们 Bot 的最终设计。我们使用白色薄胶合板。它需要很多螺丝和其他东西。
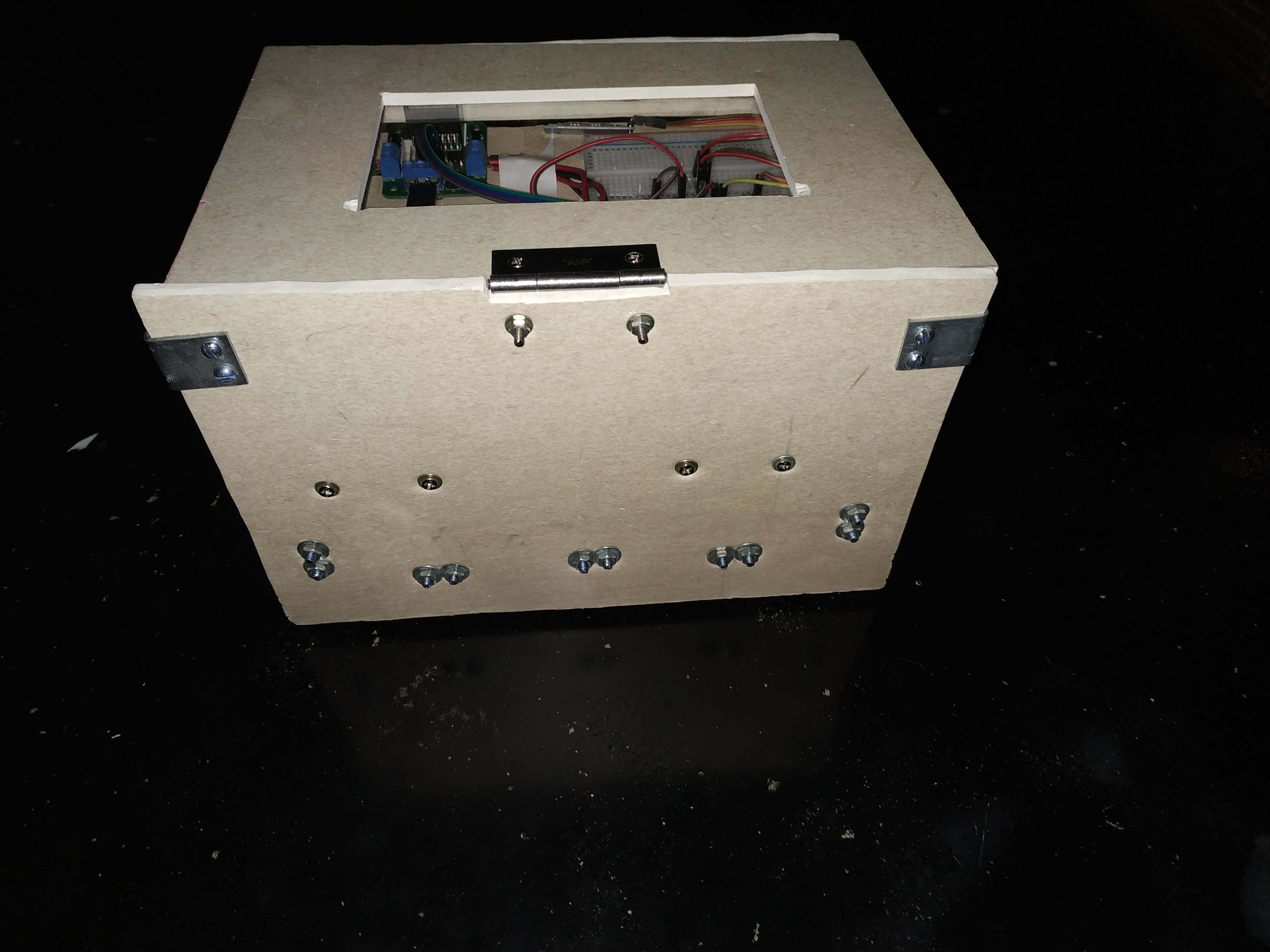
从这张照片中,您可以看到螺钉、螺母和螺栓。我们需要一些 L 形的角度来将机器人固定在四个侧面。我们把它做成长方形。
Step-3
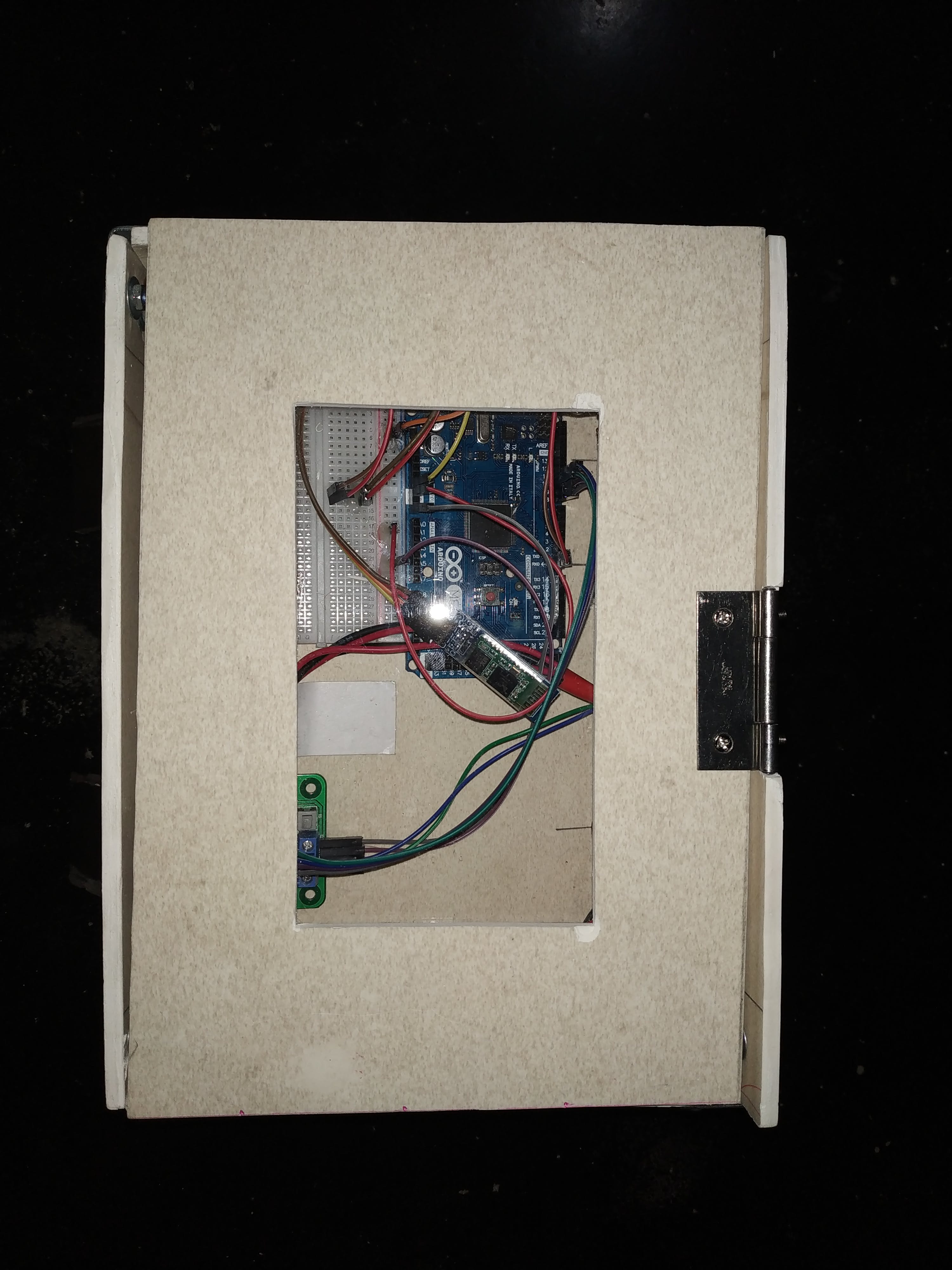
然后根据我们在原理图部分提供的原理图修复电路。
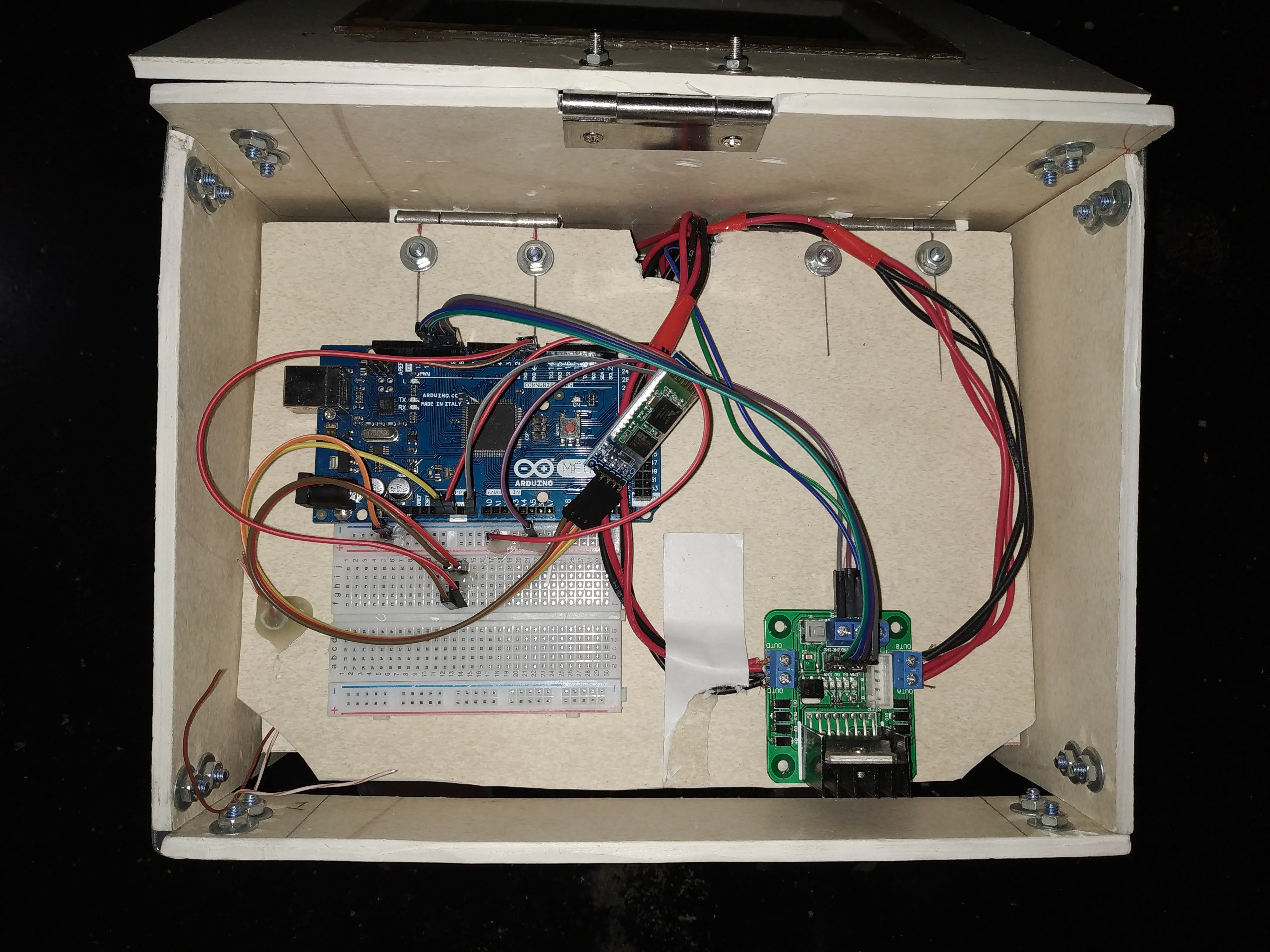
Step-4
完成电路构建后,您可以将代码上传到您的 Arduino Mega Board。只需插入 USB 电缆即可连接您的 Arduino 和 PC/笔记本电脑。然后根据代码部分编写代码然后上传代码。在这里,您需要在上传代码时拔掉 Arduino 的 RX 和 TX 连接。必须进行上传。
Step-5
然后你就可以和你的机器人一起踢足球了。
蓝牙应用仪表板创建
在这个项目中,我们使用了一个免费的 Android 应用程序来控制我们的机器人。
Step-1
从您的 Android 手机在Play 商店中搜索应用程序(蓝牙电子)并将应用程序安装到您的手机。
Step-2
完成安装后打开蓝牙电子应用程序。
Step-3
打开手机蓝牙并与蓝牙模块配对。
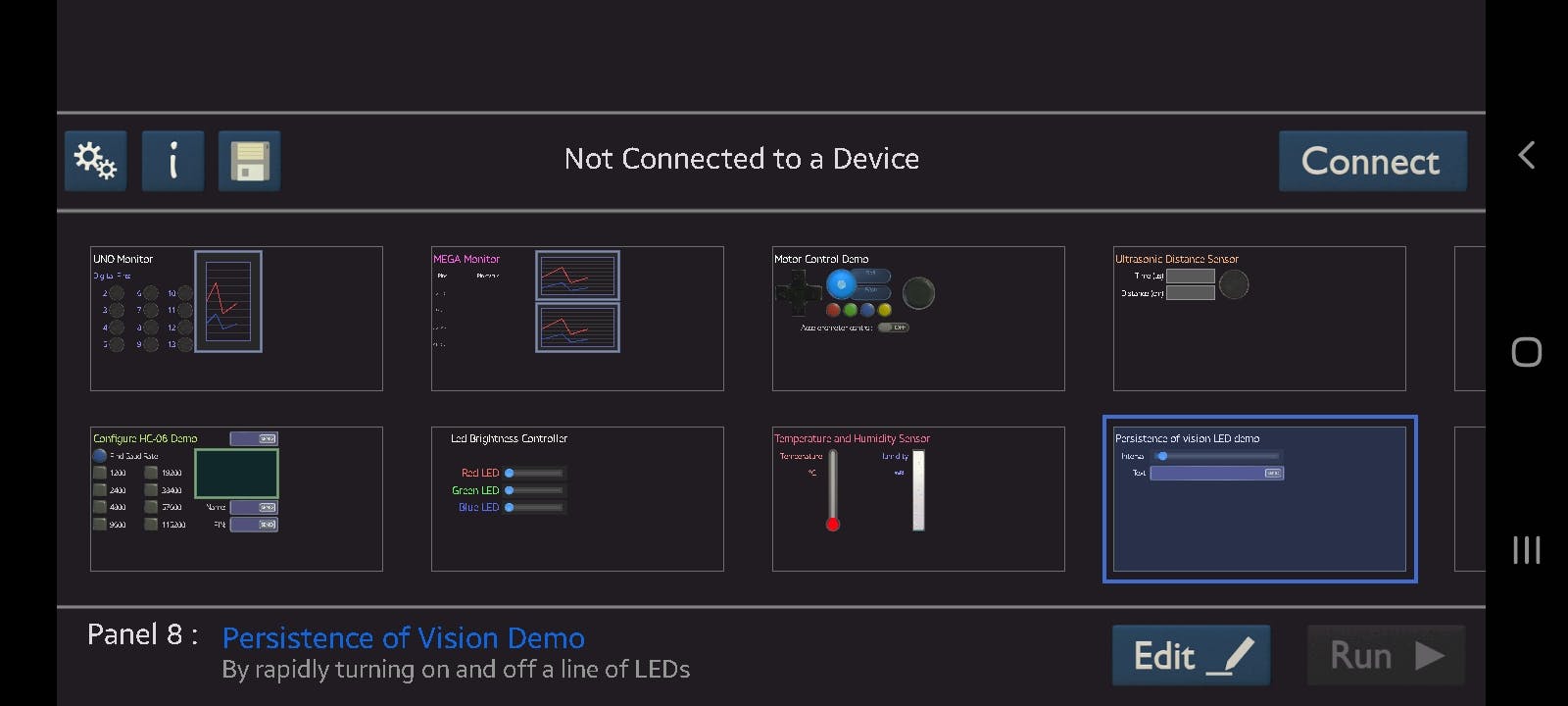
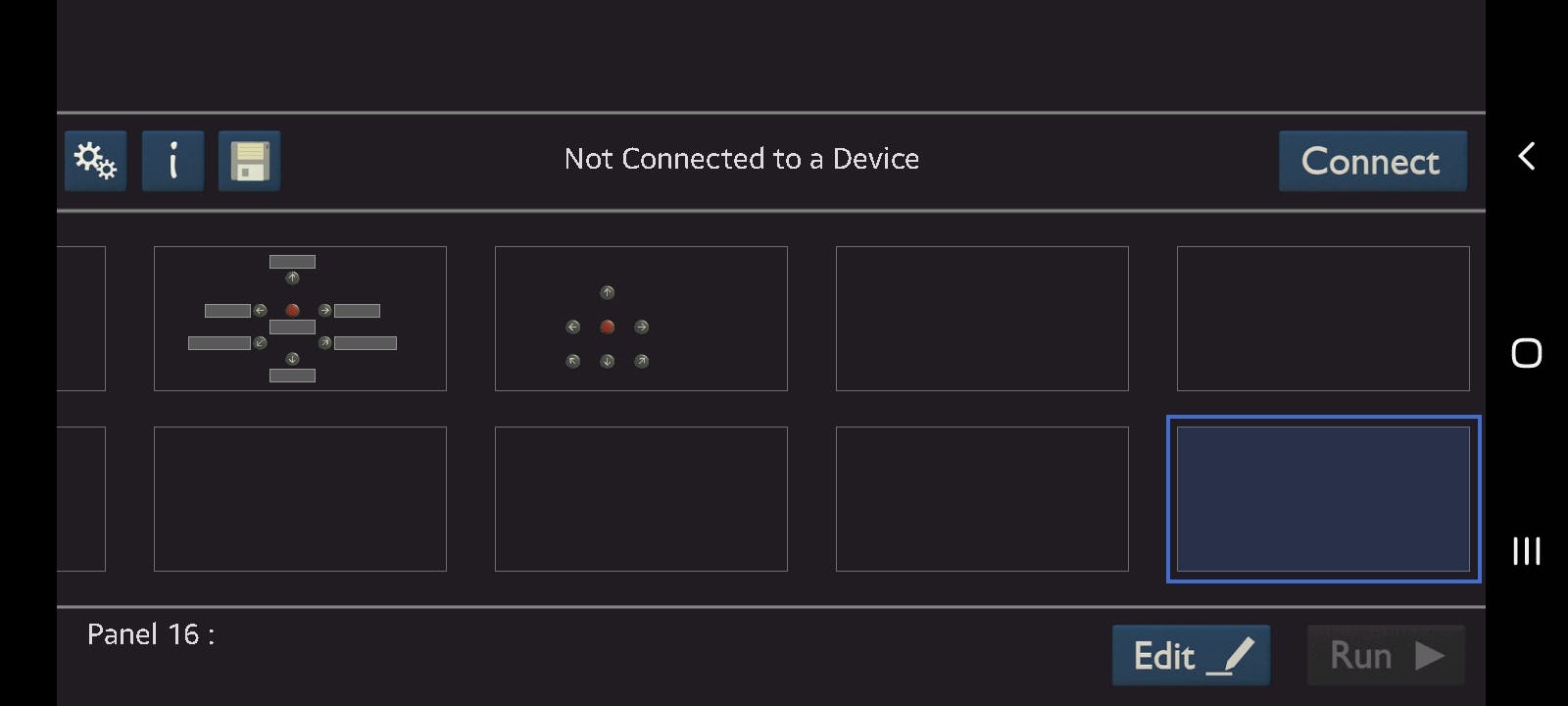
Step-4
然后选择一个空白面板来设计您需要的向右、向左、向前、向后、向右向前、向左向前和停止移动的按钮。选择空面板后,您需要单击编辑按钮。
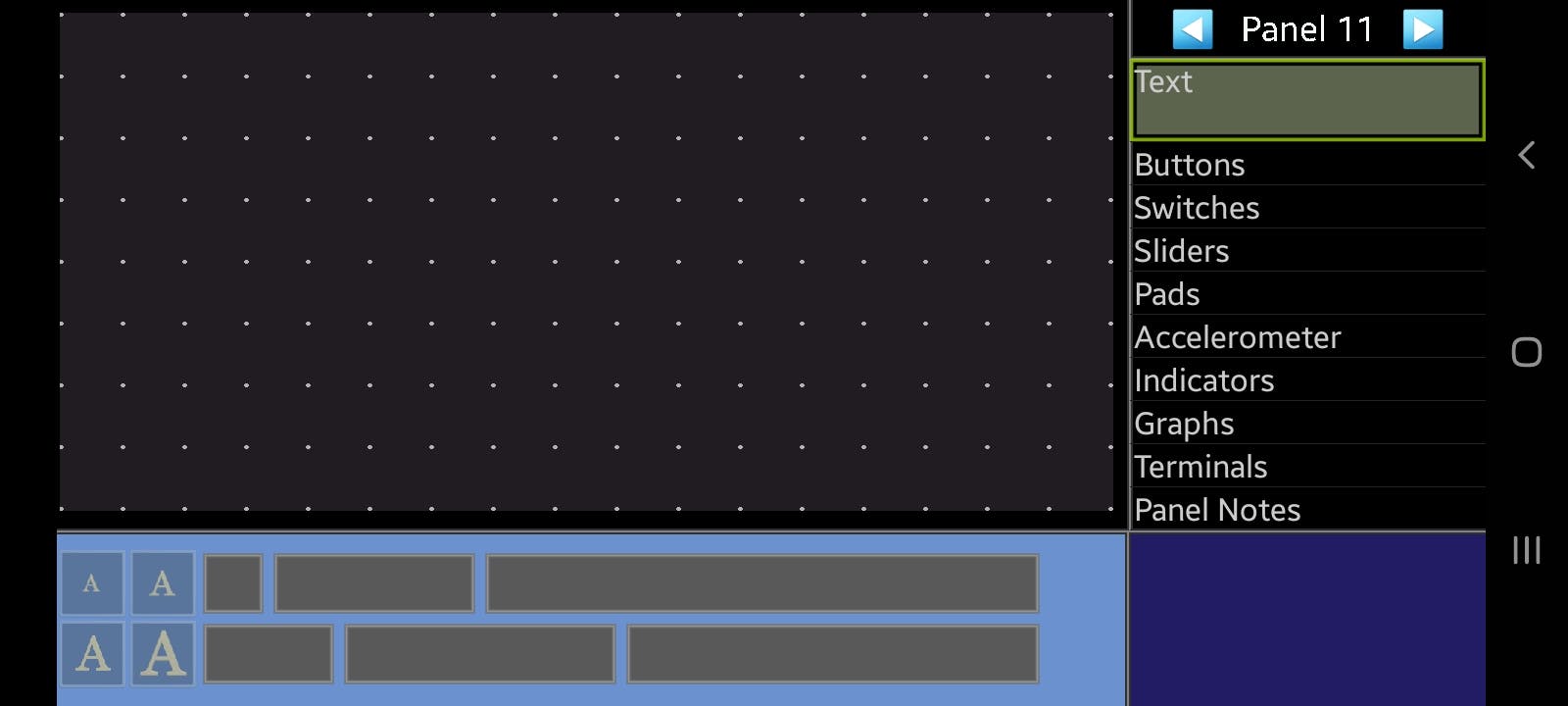
Step-5
在此步骤中,您将看到一个空面板。现在在右侧栏中,您需要选择按钮选项。现在将所需的按钮拖放到面板中。
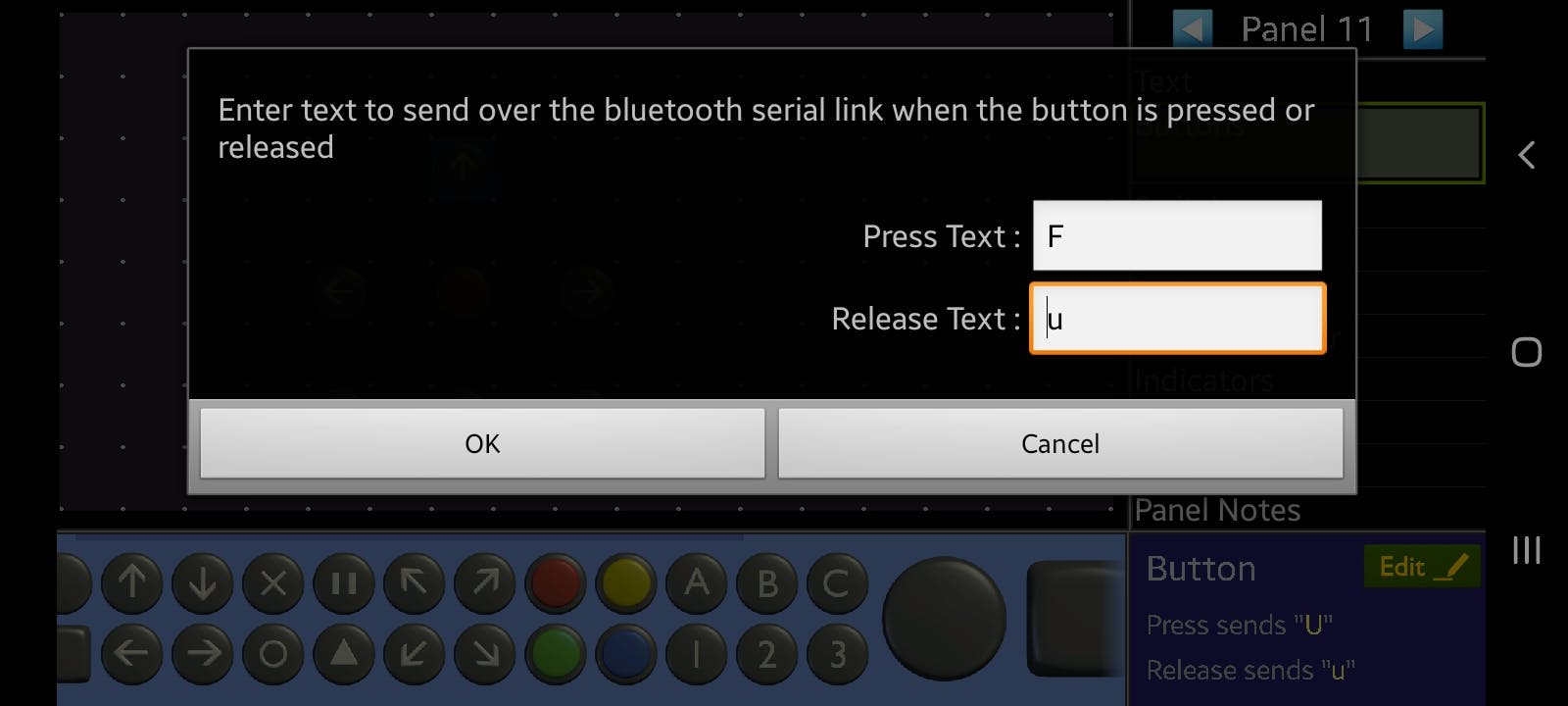
Step-6
在这部分中,您需要根据您的代码命名按钮。首先单击按钮,然后单击编辑按钮并写下按钮的正确名称。然后按确定按钮。在这里,您需要在 Press Text 字段中写下您的密钥值。您无需对 Release Text 字段执行任何操作。
Step-7
然后选择返回主屏幕。现在选择您编辑的面板并单击连接按钮以添加带有蓝牙模块的面板。在这里连接您的蓝牙模块后,您将能够使用您的 Android 手机控制您的机器人。
警告
- 在这里,您需要完美地连接所有连接。因为它会摧毁你的整个机器人。
- 非常小心地连接电池。至少重新检查电池的连接。
- 上传代码时从您的 Arduino 中移除 RX 和 TX 连接。
演示视频
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





