
资料下载


面向高效电机控制的无传感器矢量控制技术继续发展
贾永世
分享资料个
面向电机和功率级动态特性的高级建模技术可以大幅提 高电机控制效率,确保根据系统行为的实时变动实行精 密控制。通过无传感器矢量控制技术,设计人员可以增 强电机系统的性能,降低功耗,并且符合旨在提高能效 的新法规要求。基于新一代数字信号处理技术的新型电 机控制方案有望加速先进控制方案的运用。在过去十年中,随着永磁体材料的不断发展和勘测到的资 源越来越容易开采,采用永磁体同步电机(PMSM)的工业 应用高性能变速电机越来越多。使用 PMSM 驱动的先天优 势包括:高扭矩重量比、高功率因数、响应更快、结实耐 用的构造、易于维护、易于控制以及高效率。高性能速度 和 / 或位置控制要求准确判定转轴位置和速度,使相位激励 脉冲与转子位置同步。 因而电机轴上需安装绝对编码器和 磁性旋转变压器等速度和位置传感器。然而,在大多数应 用中,这些传感器会带来多种弊端,例如:可靠性递减, 易受噪声影响,成本和重量增加,以及驱动系统更复杂 等。无传感器矢量控制则不需要速度 / 位置传感器,因而这 些问题也就不复存在。近年来,关于 PMSM 的无传感器速度和位置控制方法,研 究文献中提出多种解决方案。 针对 PMSM 驱动的无传感器 转子位置估计,已开发出三种基本技术:基于反电动势(BEMF)估计的各种技术基于状态观测器和扩展卡尔曼滤波器(EKF)的技术基于实时电机建模的其他技术
反电动势技术
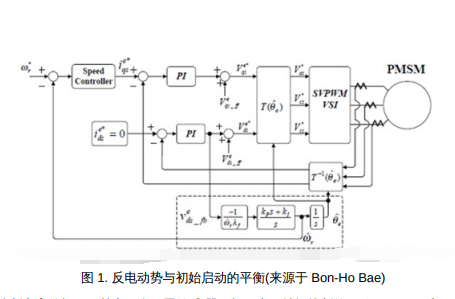
基于反电动势技术的位置估计根据电压和电流估计磁通量 和速度。在较低速度范围内,这种技术对定子电阻特别敏 感。由于机器的反电动势很小,并且开关设备的非线性特 征会产生系统噪声,因此很难得到关于机器终端的实际电 压信息。在中高速范围内,利用反电动势方法可以获得较 好的位置估计,但在低速范围内则不行。反电动势电压的幅度与转子转速成比例,因此静止时无法 估计初始位置。所以,从未知转子位置启动可能伴随着暂 时反向旋转,或者可能导致启动故障。EKF 能够对随机噪声 环境中的非线性系统执行状态估计,因而对于 PMSM 的速度 和转子位置估计,似乎是可行且具计算效率的候选方法。基于空间显著性跟踪的技术利用磁显著性,适合零速工 作,可以估计初始转子位置,而不会受其它参数影响。针 对初始转子位置,主要有两种基本方法,分别基于脉冲信 号注入和正弦载波信号注入。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



