
资料下载


无线电控制椰子收割机开源分享
李丽
分享资料个
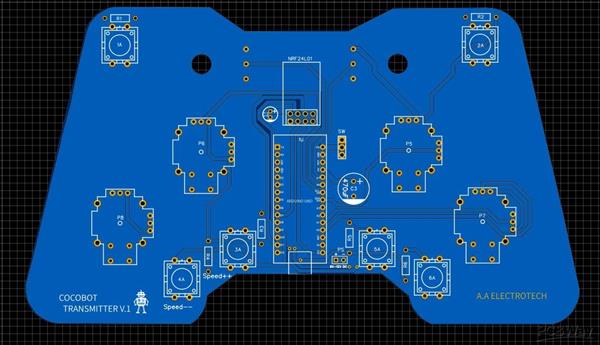
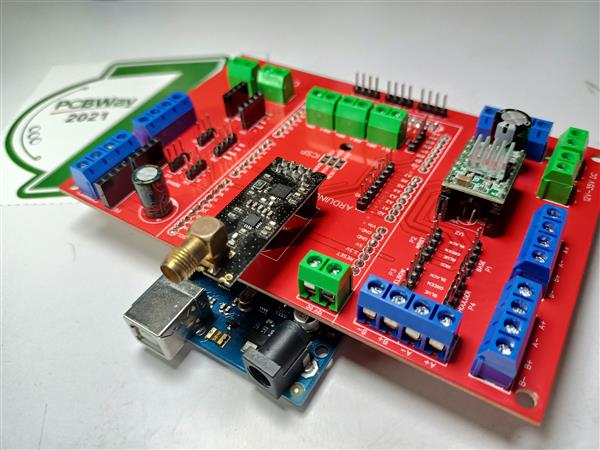
PCB图如下: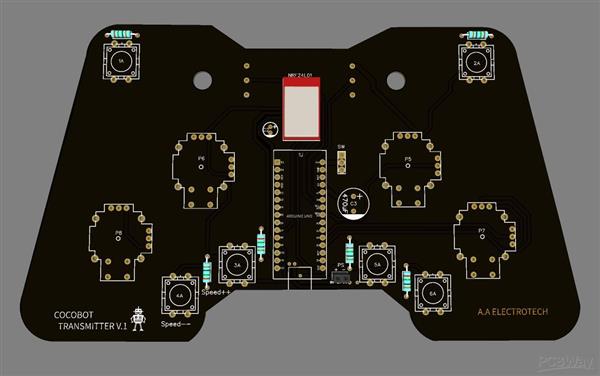
描述
无线椰子收割机 || 基于 Coco-bot Harvester Arduino Nrf24l01
无线电控制/无线 椰子收割机是一种非常有用的机器,可以通过爬上椰子树并收获椰子果实来收获大量椰子果实,而不会危及任何收割机的健康或生命。无线椰子收割机基于 Arduino,将使用 C++ 编程语言中的 Arduino Ide 进行编程。
无线椰子收割机分为2(二)部分:发射器和接收器
发射板
发射器板由 2(两个)3.7V 锂离子电池(7.4V)供电,所有输入设备都连接到该板,

该板的形状像一个普通的发射器。Nrf24l01 收发器模块连接到接收器的最远距离为 1200 米。菲律宾椰子树的标准高度为 50 到 60 英尺(15 到 18 米),因此该收发器模块的范围足够安静,可以将数据从发射器传输到接收器。发射器板的总功耗小于 1 瓦。

2 个操纵杆 - 机械臂
1 操纵杆 - 转动机构
1 操纵杆 - 垂直运动
速度调节(2 个按钮) - 垂直运动中的电机速度
电位器 - 伺服(上下)
电位器 - 伺服(左右)
组件列表:
PCB WAY-印刷电路板X1
Arduino纳米X1
Nrf24l01+解放军 X 1
电位器 X 2
按钮 X 6
操纵杆 X 4
100uf/16V 电容 X1
470uf/16V 电容 X1
拨动开关(迷你)X1
10K 欧姆电阻器 X6
2x 3.7V 锂离子电池座 X1
3.7V锂离子电池X2
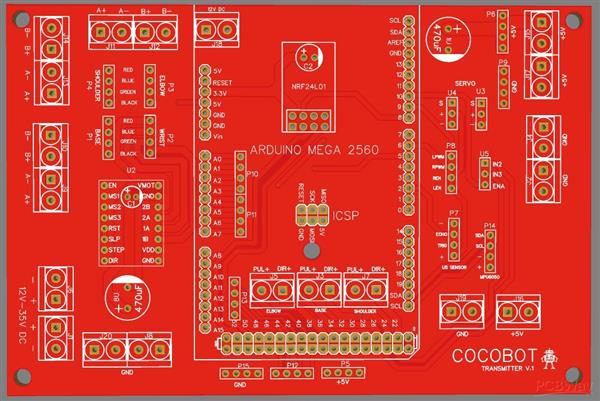
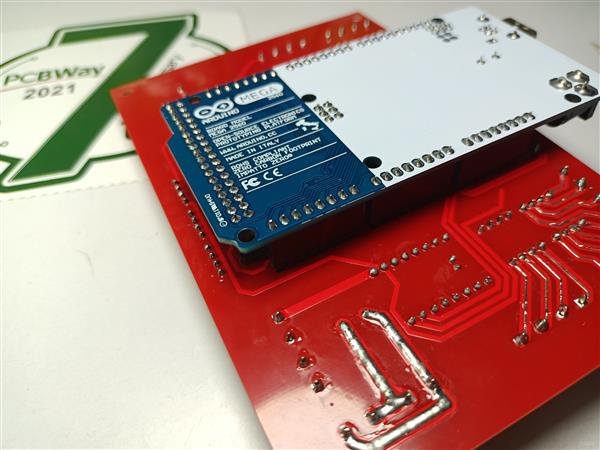
接收板
接收板在视频中由 19V 电源供电,但在实际计划中,它应该由带 BMS 和有源平衡器的 32650 LIFEPO4A 电池 4s10p 供电。每个电池的标称电压为 3.2V,要获得 12V DC,我需要串联 4 块 32650 电池,以使额定电流翻倍 I 并联 10X 4 块串联 32650 LIFEPO4A 电池(4 串 10 并联)

该电池的容量非常高 12V 60AH (720W),因此在所有负载全部运行的情况下,椰子收获机可以持续长达 2 到 3 个小时,因为负载的总计算量几乎是 300WH (25A),但实际上,当椰子收割机工作并非所有负载都在运行,因此功耗低于 300 瓦。
该板的主要大脑是 Arduino Mega 微控制器。
Nrf24l01 + PLA 收发模块连接到接收器的最远距离为 1200 米。菲律宾椰子树的标准高度为 50 到 60 英尺(15 到 18 米),因此该收发器模块的范围足够安静,可以将数据从发射器传输到接收器。

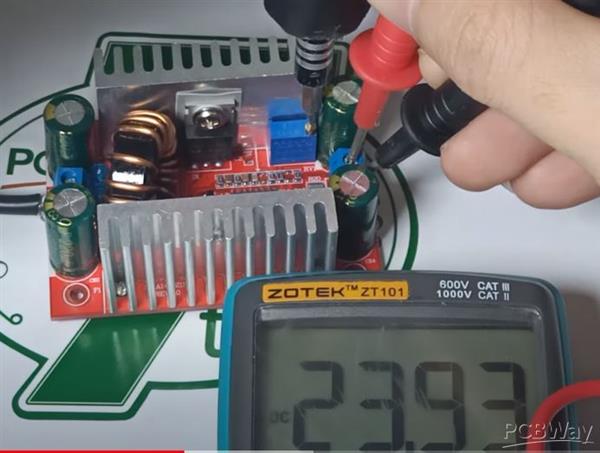
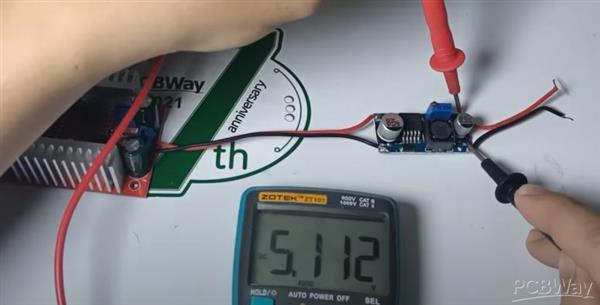
为了给我的 4 台 Nema 17 步进电机供电,我正在使用 300W 升压转换器(升压),我可以选择更高的电压以减少流向导线和步进线圈绕组的安培马达。通过提供更高的电压(如 24V DC 至 35V DC),步进电机可在运行时减少热量。当电压很低时,步进电机的加热速度更快,因为安培越来越高,这就是步进电机内部的绕组无法处理它的原因。

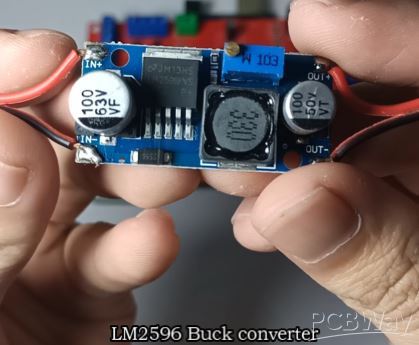
为了给 Arduino 大型微控制器供电,我将一个 LM2596 降压转换器(降压)连接到 24.5V DC 的升压转换器的输出,以将其转换为 5V DC。我决定使用这个降压转换器,因为它具有高额定电流 (5A),因此它可以补偿 Arduino mega 和 2 个伺服电机所需的功率。
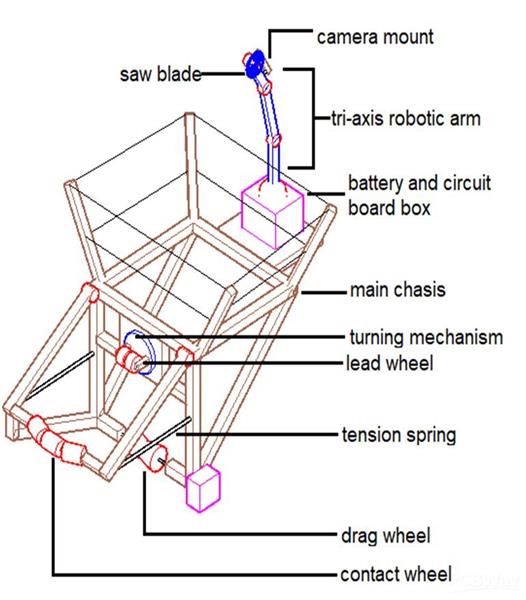
椰子收割机有不同的部分:垂直运动、转动机构、机械臂、锯片切割机。相机定位。
垂直运动
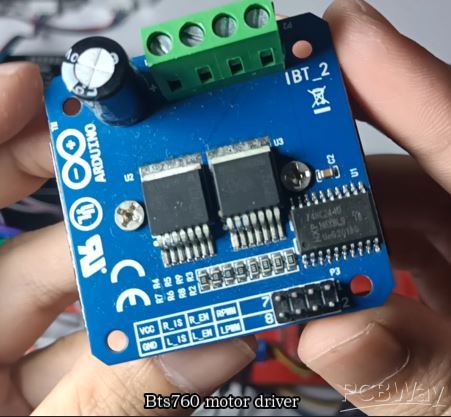
垂直运动负责机器对椰子树的上下运动。使用的马达是TAKANAWA Dc齿轮马达。24V可起重60Kg,电机驱动器为BTS760电机驱动器。

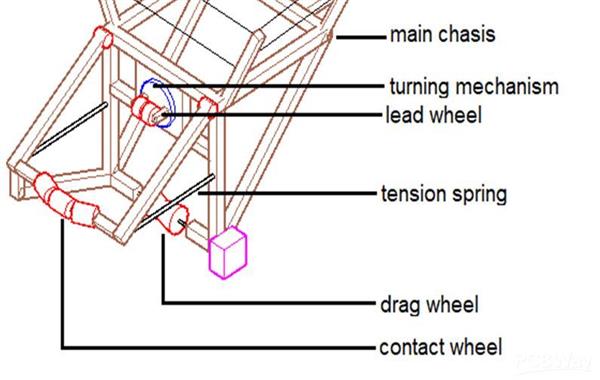
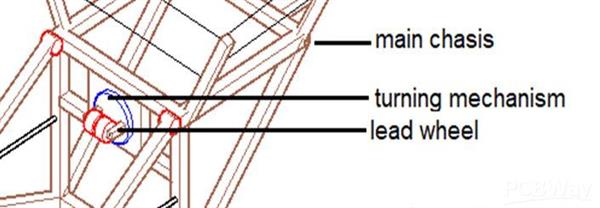
转向机构
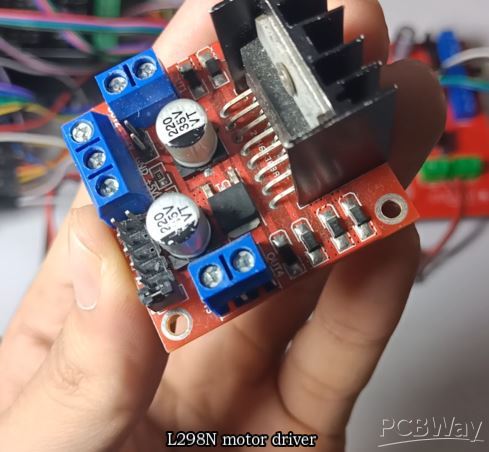
转动机构负责椰子收获机的360度旋转,使其在任何位置都可以灵活地轻松收获椰子果实。使用的马达是TAKANAWA Dc齿轮马达。
它在24V时可以举起60Kg,电机驱动器是L298N电机驱动器。

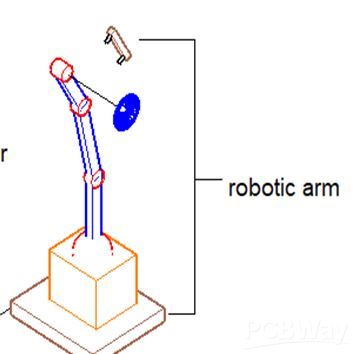
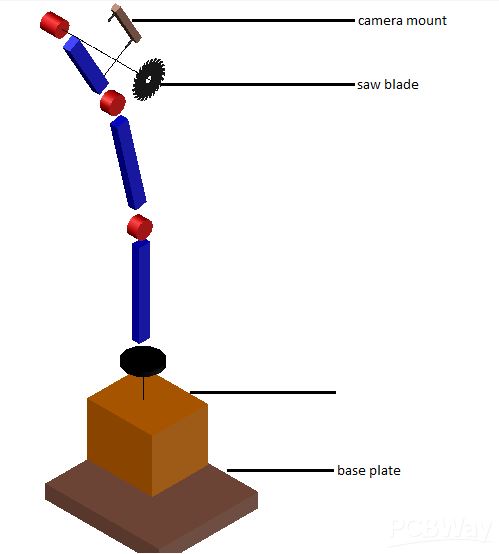
机械臂
机械臂由4个关节组成;底座、肩部、肘部和腕部,这 4 个关节由 Nema 17 步进电机中的每一个控制。用于此的驱动器是 TB6600 和 A4988 步进驱动器。机械臂的主机架计划通过 3D 打印制造。机械臂用于定位锯片切割机,以准确切割椰子果实的茎部以进行收获。


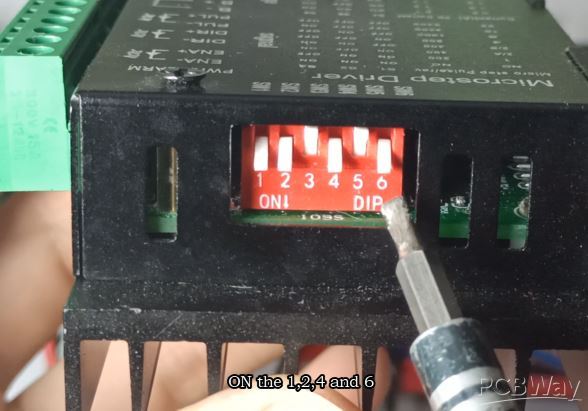
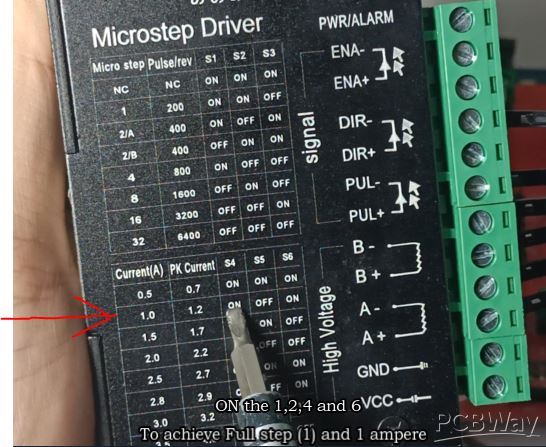
TB6600 步进驱动器

您可以通过设置连接到驱动器的 DIP 开关来实现 NEMA 17 步进电机的步进,要选择 FULL STEP 和 1 Ampere 额定值,您应该打开 1、2、4 和 6 DIP 开关。

A4988 用于 NEMA 17 腕关节步进电机,由于手腕是最后一个关节,因此与其他关节相比,它承受的负载较小,因此需要一点动力来操作它。

锯片切割机
锯片切割器用于切割椰子果实的茎部以进行收获,它配有一个继电器模块来打开和关闭这个
刀具。


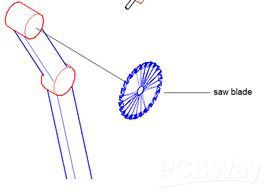
相机定位
摄像机定位由两个伺服电机(MG960)控制,每个伺服电机负责左右和上下的角度位置。借助连接在机械臂上的无线摄像头,将摄像头捕获/视频输出传输到手机,它可以帮助收割机在较低的地面位置保持清晰的视野。


组件/材料清单:
PCB WAY-印刷电路板X1
Arduino 超级 X1
Nrf24l01 X1
2 针接线端子 X8
4 针接线端子 X6
女头和男头
A4988步进驱动器X1
1000uf/16V 电容 X1
470uf/35V 电容 X1
TB6600 步进驱动器 X3
BTS760电机驱动器X1
L298N电机驱动器X1
LM2596 降压转换器 X1
300W升压转换器X1
加载组件:
TAKANAWA直流减速电机X2
伺服电机 (MG966) X2
555直流电机X1
NEMA 17 步进电机 X4
我开发了故障安全系统:如果发生短路或断开连接,椰子收获机将自动下降,因此机器不会卡在树上。我计划建造整台机器并在 Coconut 领域进行测试。
很快你就会看到它在帮助我们的椰子收割机,爬到树上,收获很多椰子树。
代码
GOOGLE 驱动所有文件(发射器和接收器的示意图、Arduino 代码、发射器和接收器的 PCB GERBER 文件。)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





