
资料下载


使用myCobot280 M5Stack控制器
杨帆
分享资料个
描述
myCobot 是Elephant Robotics的 6 自由度机械臂,在协作机械臂中拥有最高的性价比。本文是关于使用myCobot280-M5Stack 的体验。我将使用python对其进行编程,包括环境构建、代码测试和开发。
介绍
顾名思义,这个机器人使用 M5Stack 控制器。所以在使用的时候,我们需要用电脑搭建编译环境,我会用python语言来做。有一个名为 pymycobot 的官方库,我将在 python 中使用它来操作机械臂。
环境建设
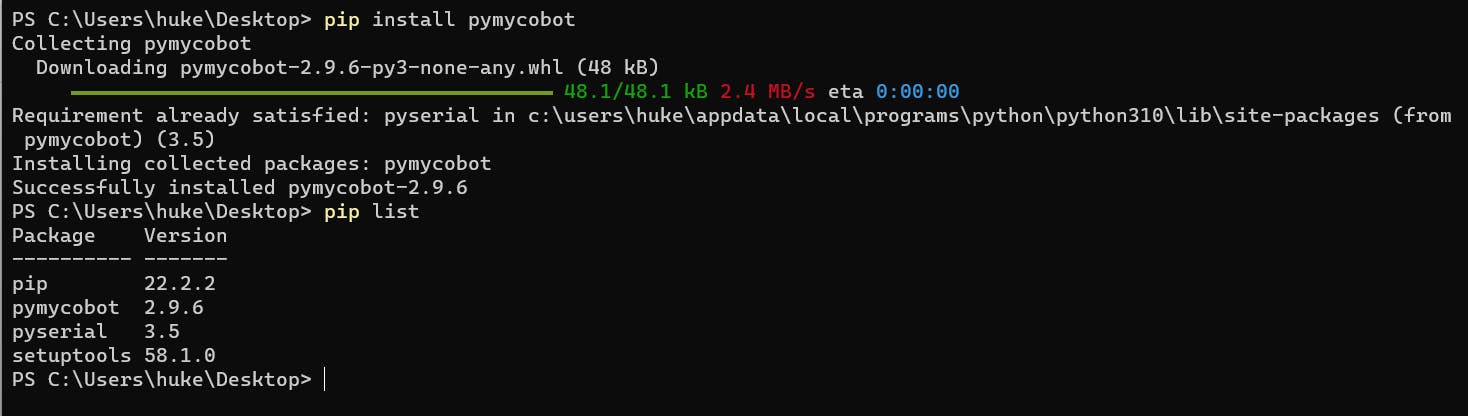
电脑上安装python环境,下载pymycobot库。提供了两种方法:
- Elephant Robotics Gitbook上提供了有关构建 python 环境的更详细的教程。
-
在谷歌上搜索相关教程。安装好编程环境后,我们下载驱动库。
pip install pymycobot
控制机械臂
开始导入一些 python 库。
from pymycobot.mycobot import MyCobot
import time
(1)MyCobot(端口、波特率)
创建一个与 myCobot 通信的对象。端口:机械臂的串行端口。波特:机械臂的波特率。
#The serial port of my arm is COM7, baud rate 115200.
mc = MyCobot('COM7',115200)
(2)get_angles()
获取myCobot所有关节的角度数据。返回值:返回值是一个包含六个数据元素的列表,对应关节1到6。
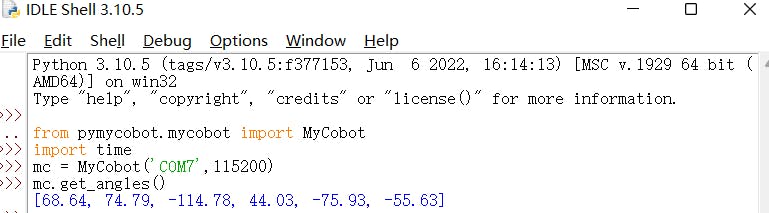
如图所示,我们可以看到 myCobot 的角度

(3)send_angles(度数,速度)
将运动的角度和速度发送到所有关节。度数:关节的角度在-180到180的范围内,分别按照1到6个关节的顺序存储在一个列表中。速度:机械臂运动到指定角度时的速度。mc.send_angles([0,0,0,0,0,0],50)像这样跑。
(4)send_angle(ID, DEGREE, SPEED)
将角度和速度发送到单个关节。Id : 1 到 6 范围内的整数,分别对应 1-6 轴的机械臂。度数:关节的角度在-180到180的范围内,分别按照1到6个关节的顺序存储在一个列表中。速度:机械臂运动到指定角度时的速度。以 50 的速度使关节运动达到 90 度的位置。mc.send_angle(1,90,50)
(5) release_all_servos()
解锁机械臂,使其可以随意手动摆动。注意,执行这个命令时,手臂会因为重力而下落,所以要小心防止它撞到其他东西。mc.release_all_servos()机械臂被控制时通电,通过这个功能,我们可以摆动机械臂。
演示
编写一个演示,让 myCobot280-M5Stack 跳舞。
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
from pymycobot.mycobot import MyCobot
import time
mc = MyCobot('COM7',115200)
mc.send_angles([0,0,0,0,0,0],50)
time.sleep(1)
for count in range(3):
mc.send_angles([87.8,(-51.5),60.9,11.95,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([87.97,42.01,(-45.26),10.37,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
for count2 in range(4):
mc.send_angles([43.24,93.42,(-140.88),48.07,60.64,(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
myCobot280-M5Stack 第一次体验到此结束。如果你喜欢这篇文章,请给我一个赞或发表评论以支持它。谢谢!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





