
资料下载


Tito之Arduino UNO 3D打印机器人
刘洋
分享资料个
描述
如果您没有或难以获得零件,您可以购买我们的完整套件!
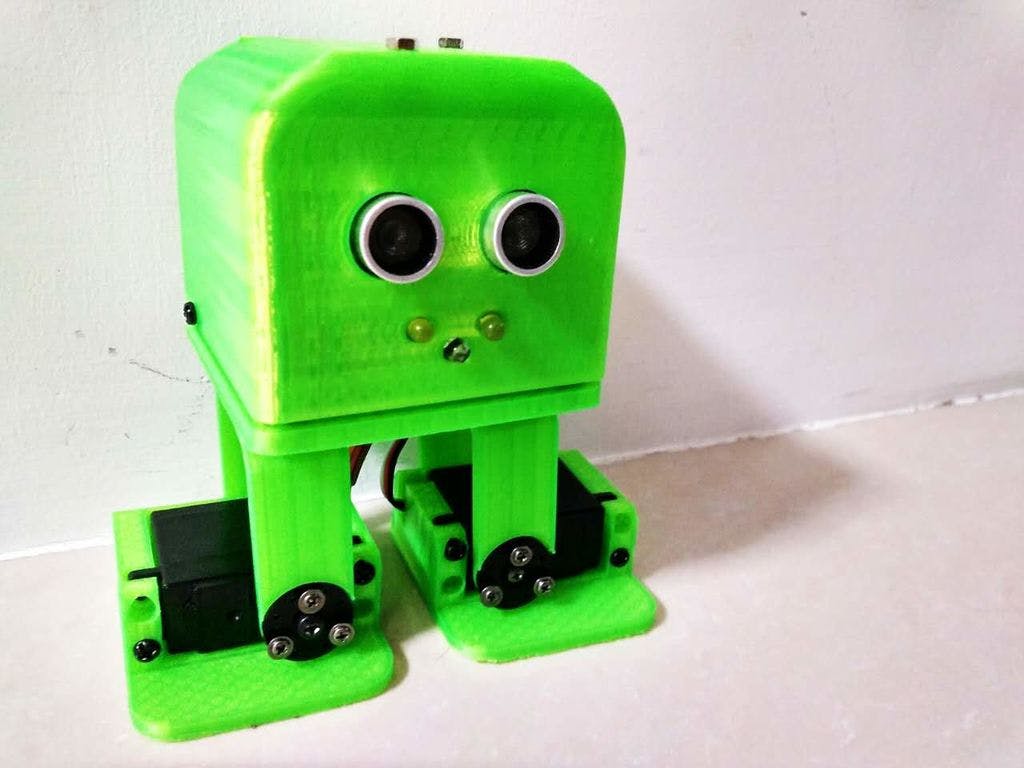
Tito 是一个 Biped 跳舞 DIY 机器人,衍生自 Zowi 和 Bob。基本上已经适应标准的 Arduino UNO 板,连接和支持更容易。这是Otto DIY的第一次迭代

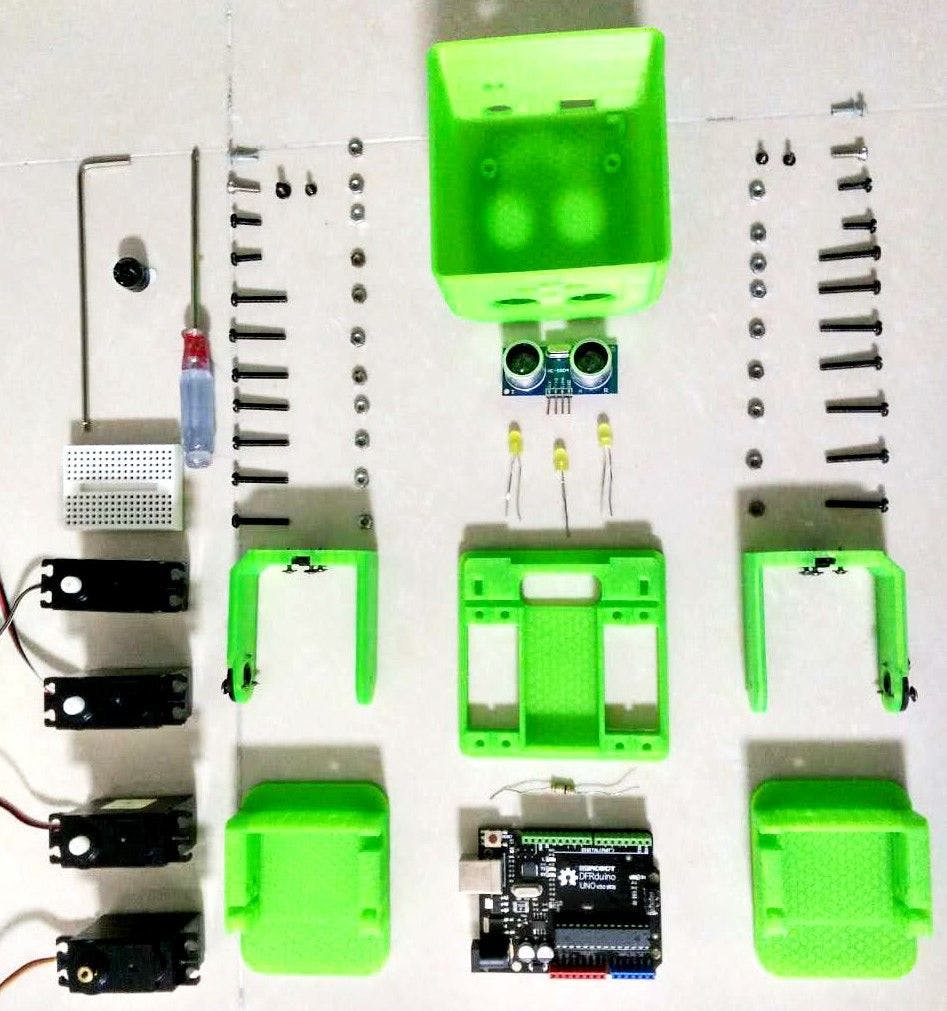
工具和材料
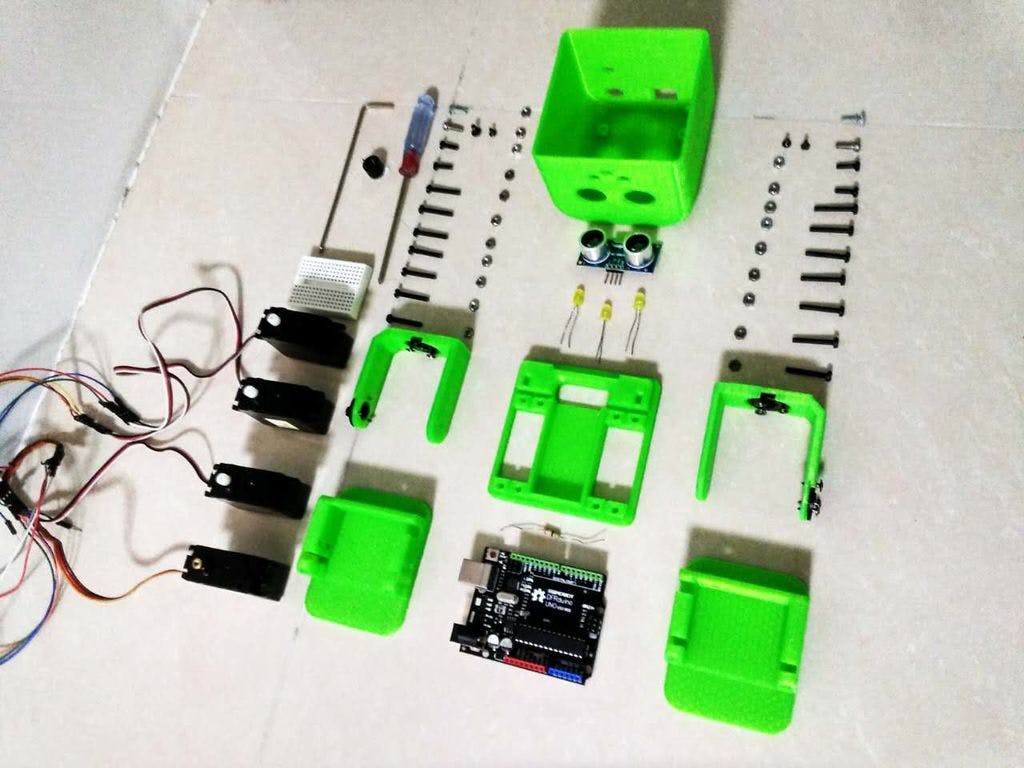
- Arduino UNO 板或兼容(在我的情况下是 DFRduino UNO)
- 纳米面包板
- 蜂鸣器
- 双叶伺服 S3003 x4
- HC-SR04 超声波传感器
- 移动电源(可选)
- 螺母 M3 x20
- 螺丝 M3 x20
- 3D打印头
- 3D打印底座
- 3D打印腿x2
- 3D打印脚R
- 3D 打印脚 L
工具:
- 3D打印机
- 六角扳手
- 螺丝刀
3D打印零件

3D.stl 文件在这里。找到一种 3D 打印零件的方法,它们是为无支撑设计的,因此非常容易以 20% 的填充和 0.2 毫米的分辨率进行打印。由于 Tito 是完全开源的,您可以在此处找到在 Autodesk 123D Design中制作的 3D 模型文件的设计:
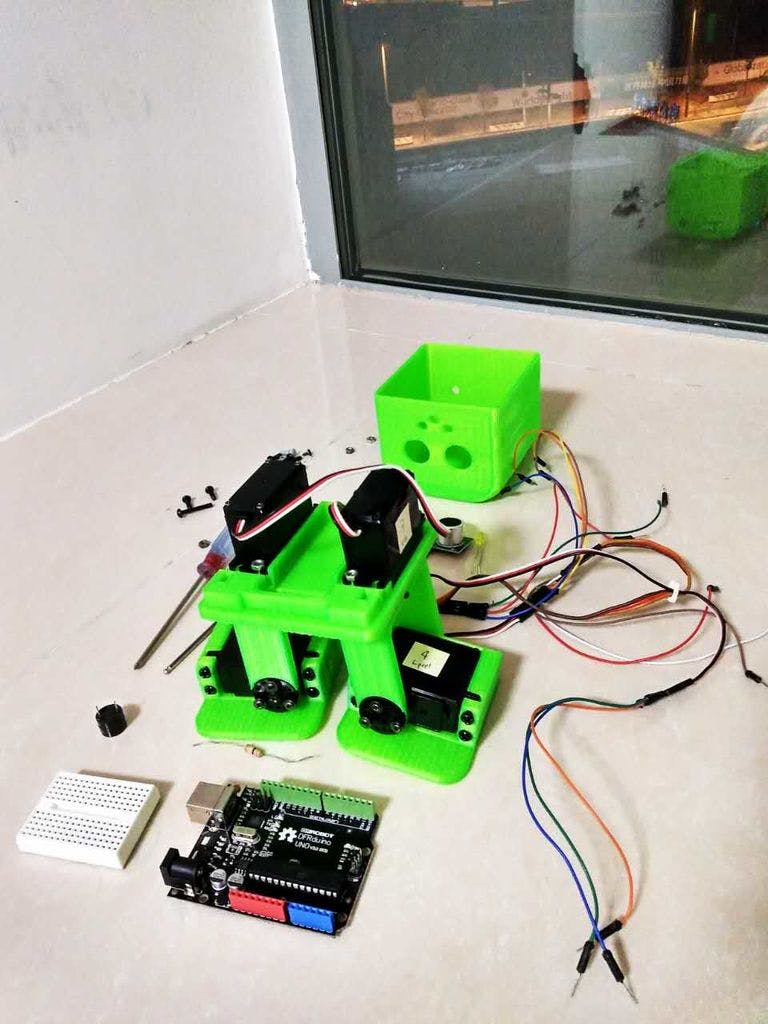
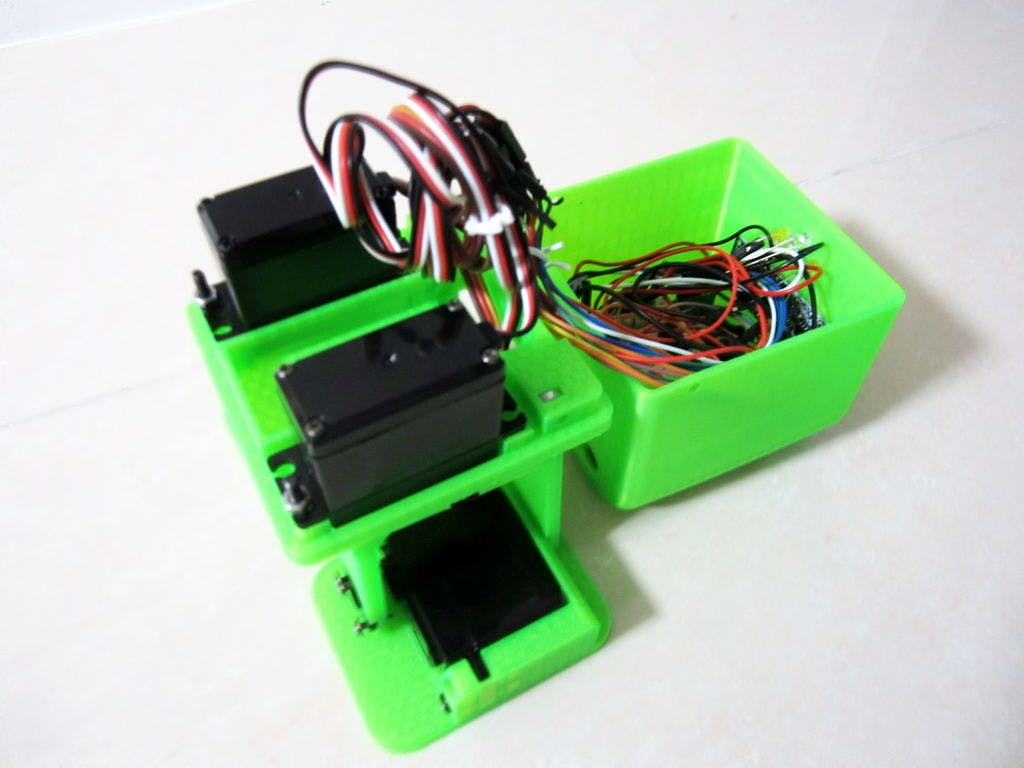
预组装
构建 Tito 的方法有很多,但一个建议是:在连接舵机之前,将舵机盘片组装到腿上,然后将舵机放入身体和脚部。
原理图
按照图片进行连接。HC-SR04 超声波传感器(针 8 触发和针 9 回波)。在制作过程中,您可能需要不断断开和连接,因此只需保留此原理图以进行进一步修复。
测试舵机的位置
在图片中,电缆已断开,但这里的想法是将代码上传到 Arduino UNO 板,这将使所有伺服器处于 90 度。然后匹配身体和脚部曲柄盘的直角。铁托应该在照片中的位置。然后你可以用螺丝轴固定所有的舵机。
组装 Arduino UNO 板
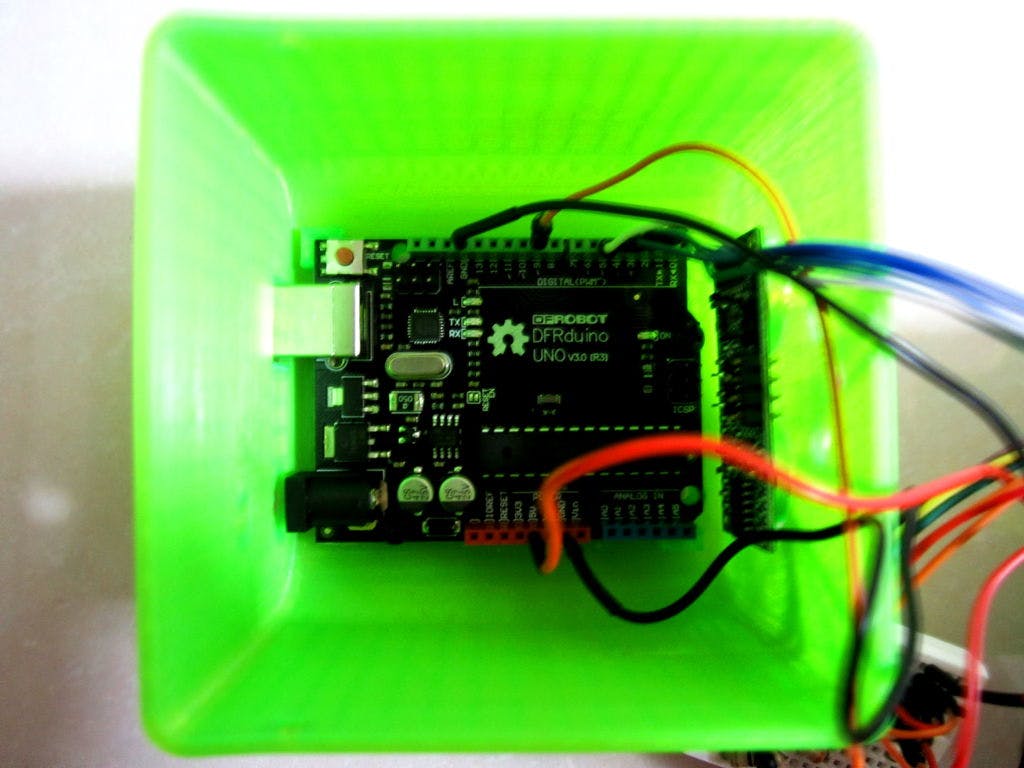
这种设计可以很容易地在头部固定任何 Arduino Uno 兼容板(在我的情况下是 DFRduino UNO),您最多可以使用 4 个螺钉。
总装
如果所有连接都已固定,您可以关闭头部并使用侧向螺钉将其固定到身体上。
Arduino IDE编程
所有库和草图代码都在这个Github 存储库中。只需将您的 USB 电缆连接到 Arduino UNO 并上传代码。机器人有许多程序化的运动,如不同方向的行走、超声波、抬起、倾斜和跳舞。
在黑客社区或Thingiverse 中发布您的混音和修改
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




