
资料下载


使用TinyML确定植物的健康状况
张勇
分享资料个
描述
前提
就像人类一样,植物也会生病。就像您可能因皮肤感染而出现皮疹一样,植物的叶子可能会因真菌或其他病原体而变黄和/或出现斑点。因此,通过利用机器学习的力量,可以扫描颜色,然后用于训练可以检测叶子颜色何时关闭的模型。
硬件
这个项目的大脑是 Arduino Nano 33 BLE Sense,选择它有几个原因。首先,它拥有丰富的强大传感器,包括 9DoF IMU、APDS-9960(颜色、手势、接近度和亮度)、麦克风和温度/湿度/压力传感器组合。为了在植物的叶子周围移动电路板并进行测量,一对步进电机与一对 DRV8825 驱动板结合使用。
设置 TinyML
对于此项目,为 Arduino Nano 33 BLE Sense on Edge Impulse 列出的内置传感器将不起作用,因为仅列出了加速器和麦克风。这意味着必须使用数据转发器而不是串行守护程序。首先,我创建了一个新项目并将其命名。接下来,我通过安装 Node.js 和 NPM 来安装 Edge Impulse CLI,然后运行npm install -g edge-impulse-cli. 如果找不到,您可能需要将其安装路径添加到 PATH 环境变量中。接下来,运行edge-impulse-data-forwarder并确保它正常工作,然后使用 Ctrl+C 退出。
阅读颜色
APDS-9960 通过从表面反射红外光并读取未被材料吸收的波长来读取颜色。要与传感器通信,最好安装 Arduino APDS9960 库,它可以访问几个有用的功能。在代码中,APDS-9960首先被初始化,然后程序进入循环功能。在那里,它一直等到有颜色数据。如果读数可用,则颜色与APDS.readColor()与表面的接近度一起被读取。每个 RGB 分量都从 0-2^16-1 数字转换为其值与总和的比率。
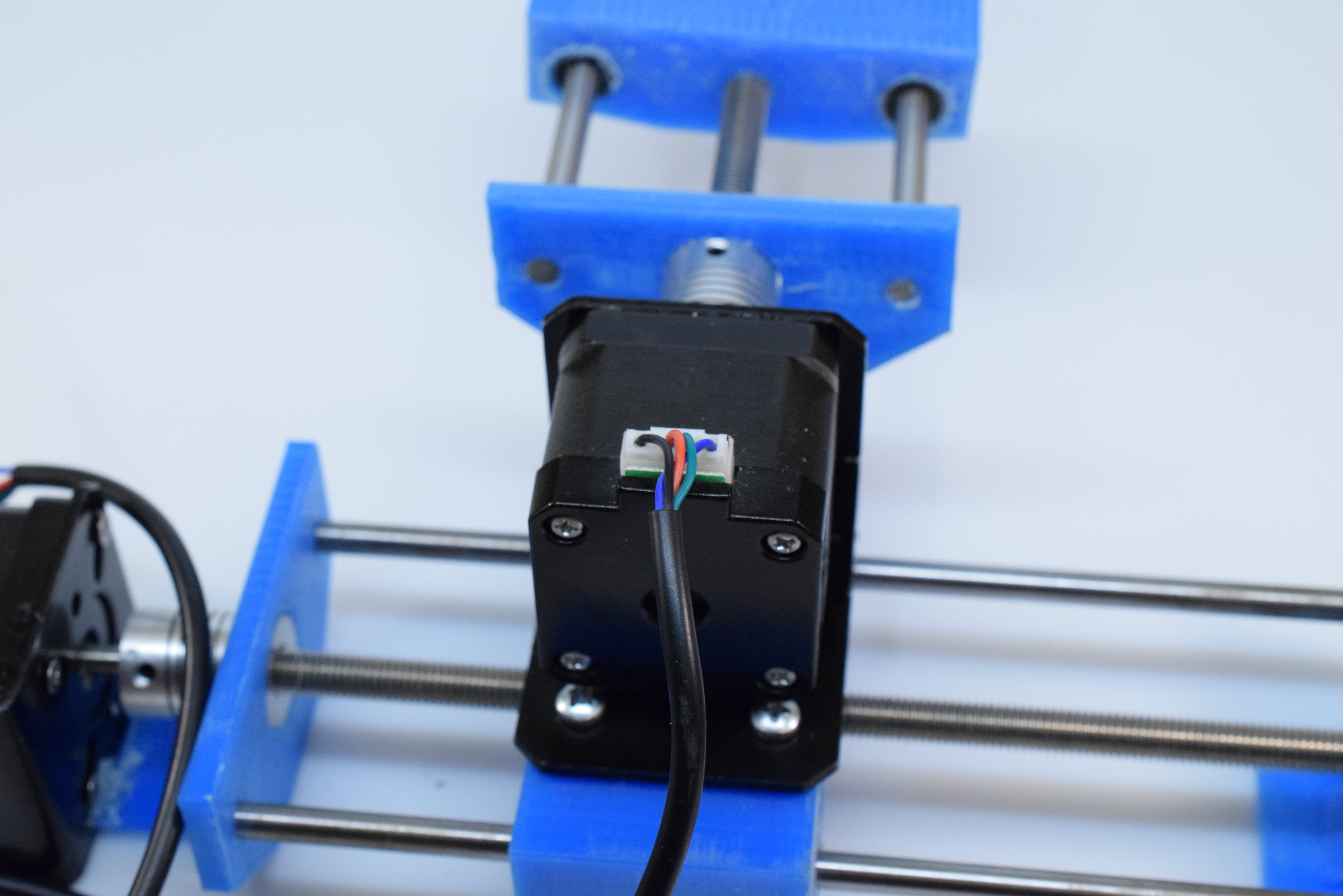
扫描装置
扫描树叶的颜色是通过在两个轴上移动一个钻机来通过板载 APDS-9960 下方树叶的不同位置来完成的。每个轴都通过顺时针或逆时针旋转导螺杆来移动,以在任一方向平移块。整个系统是在 Fusion 360 中设计的,下面是一些设计的渲染图:

X 轴位于 Y 轴的顶部,让顶部块在两个轴上移动。Y轴上有一个额外的V形轮来支撑步进电机的重量。零件使用 PLA 塑料打印,填充量约为 45%。
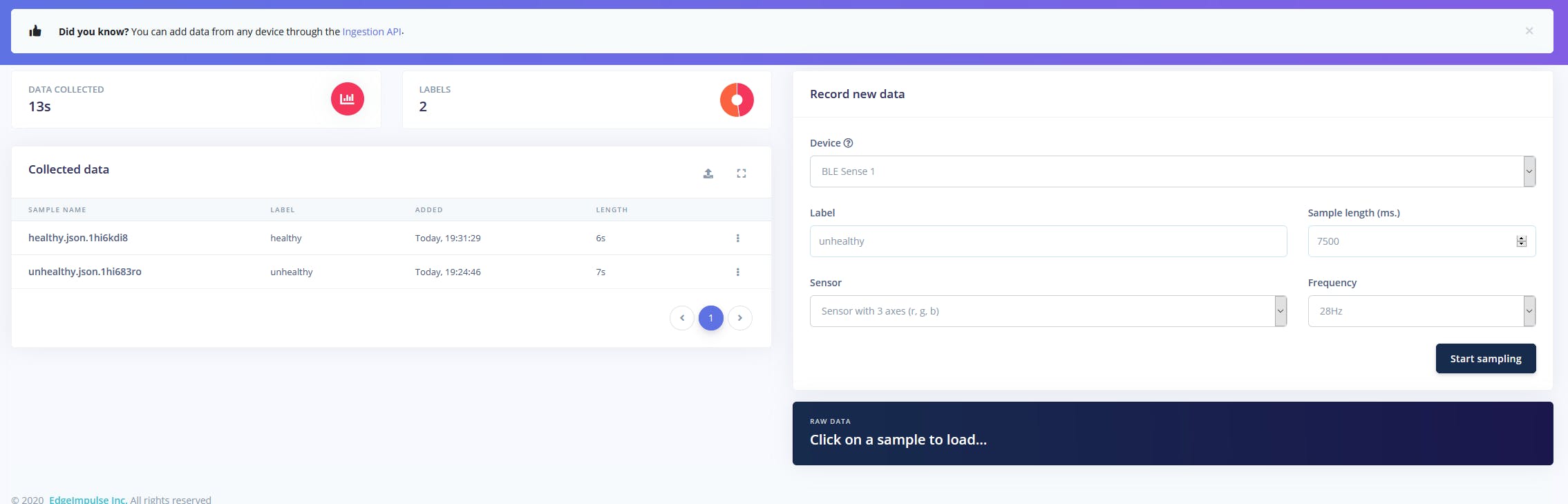
收集数据
当系统第一次启动时,步进电机不知道它们在哪里,因此两个轴通过逐步移动到原点直到它们碰到限位开关来回零。接下来,APDS-9960 被初始化。有一个边界框,它被定义为两个包含框的对角的二元素数组。在这两个位置之间选择一个随机点,然后步进器运行到该位置,同时读取其间的颜色。
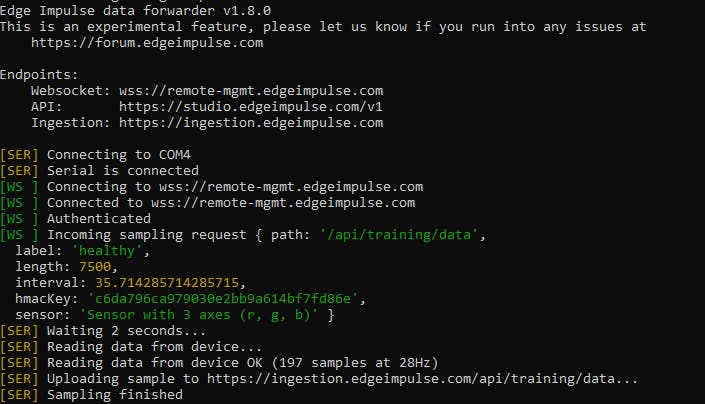
处理和发送颜色信息
APDS.readColor()如前所述,使用 读取颜色。计算总和后,通过调用该方法计算百分比,然后通过USB发送。Serial.printf()值用逗号分隔,每个读数用换行符分隔。当数据转发器程序接收到数据时,它将作为具有给定标签(健康或不健康)的训练数据发送到 Edge Impulse 云项目。
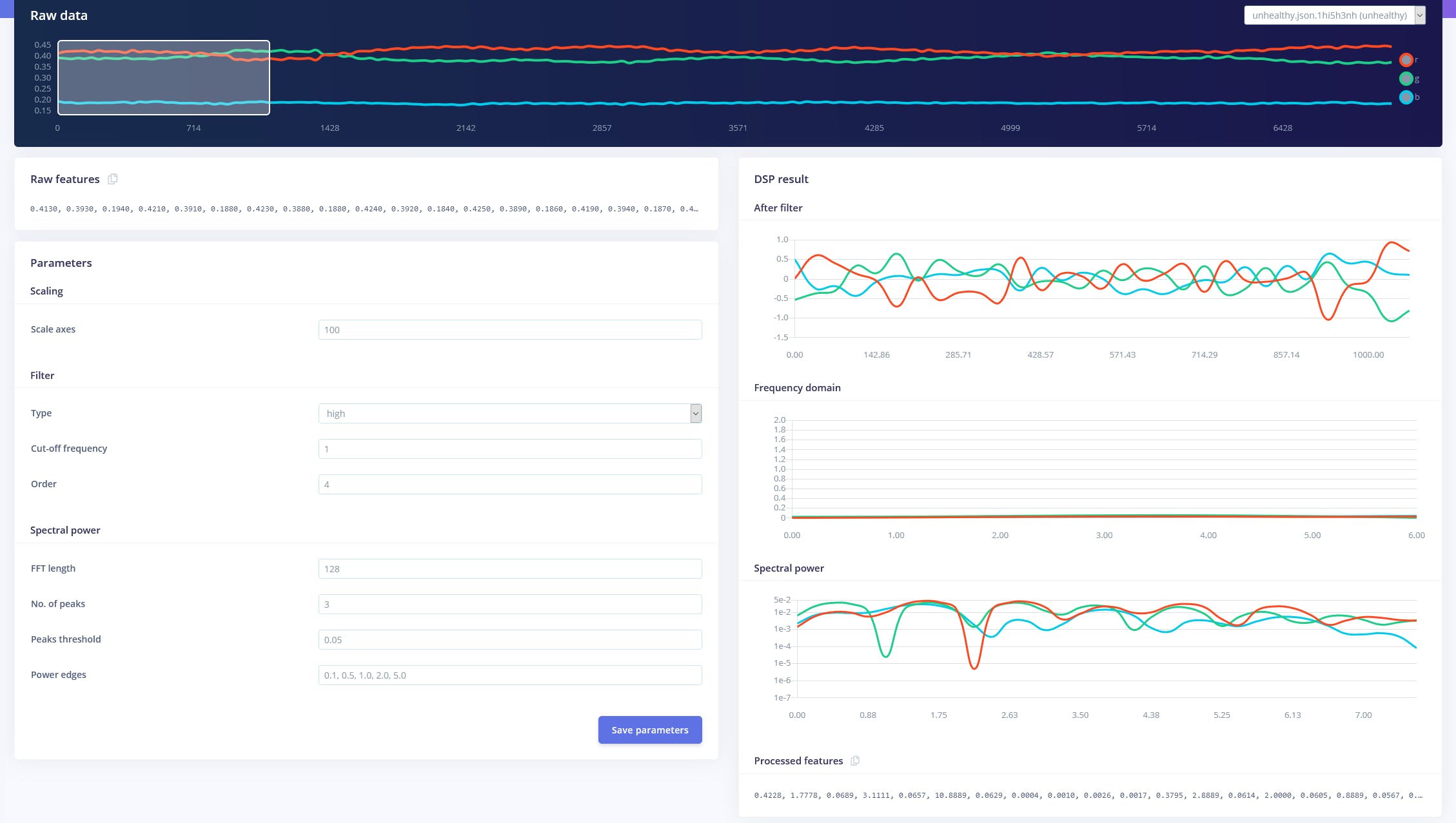
训练模型
收集完所有的训练数据后,是时候建立一个模型来区分健康和不健康的叶子了。我使用了由三轴时间序列、频谱分析块和 Keras 块组成的脉冲。您可以看到下面的屏幕截图,了解我是如何从数据中生成特征的:
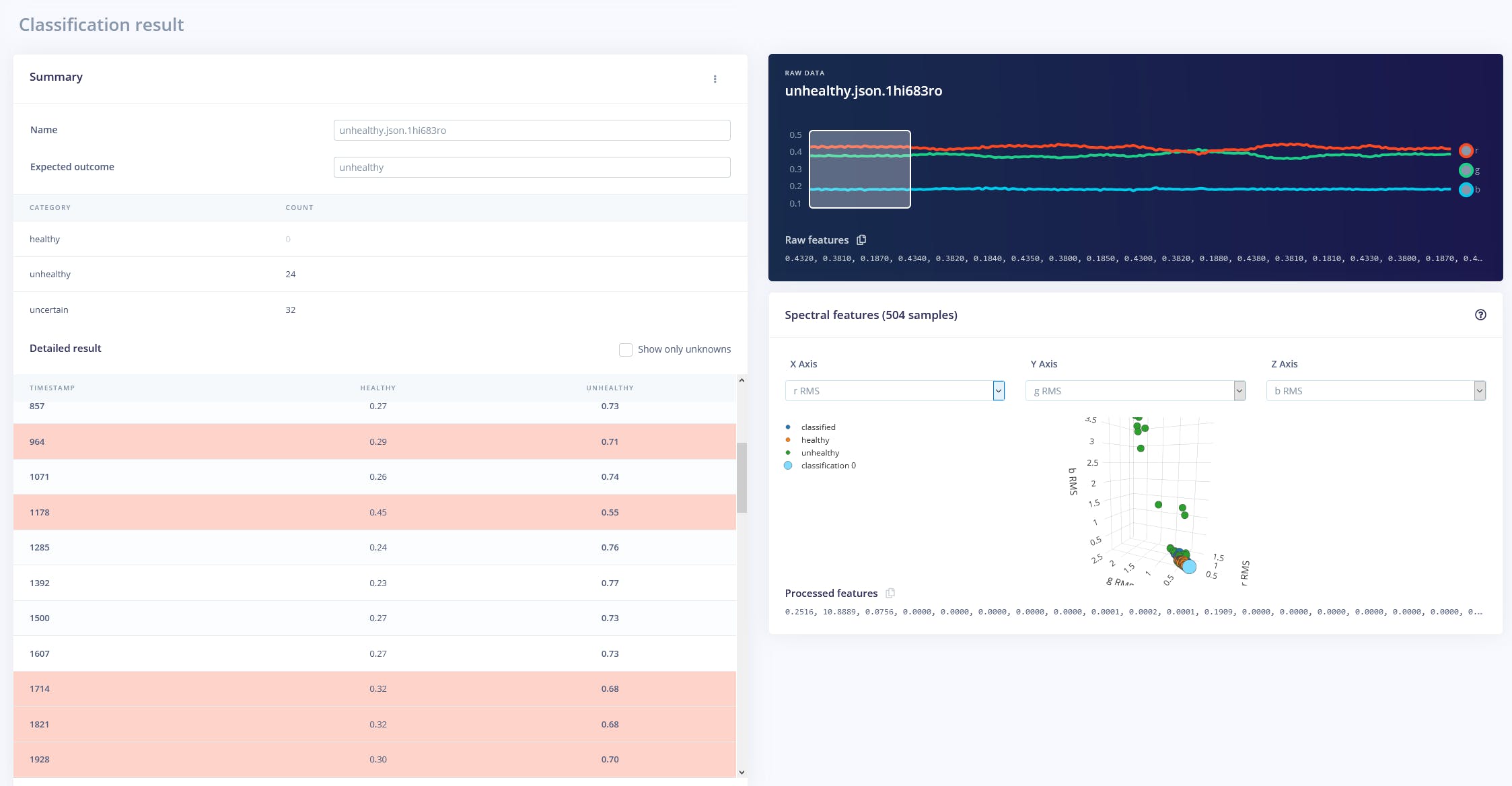
测试
为了测试我的新模型,我收集了一些新的测试数据,这次是不健康的叶子。该模型的准确率在 63% 左右,通过一些测试特征发送后,大部分时间都能正确分类叶子。
可以通过添加更多的训练数据和减慢训练速度来提高这种准确性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





